CPC Definition - Subclass G05D
This place covers:
Systems for controlling or regulating non-electric variables, in particular: position, trajectory, attitude or altitude of a vehicle; position or direction of an object; thickness or size of materials; flow rate; level; quantity ratio; linear or angular speed; force or stress; fluid pressure; torque or mechanical power; vibrations; chemical variables; humidity; temperature; viscosity; and illumination.
"controlling" means influencing a variable in any way, e.g. changing its direction or its value (including changing it to or from zero), maintaining it constant, limiting its range of variation.
"regulation" means maintaining a variable automatically at a desired value or within a desired range of values. The desired value or range may be fixed, or manually varied, or may vary with time according to a predeterminated "programme" or according to variation of another variable. Regulation is a form of control.
Merely acting on a variable for the purpose of influencing the state of a system (e.g. acting on the fuel flow rate in an engine for achieving a certain speed), where the value of the variable itself remains irrelevant, should a priori not be considered as controlling or regulating said variable.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Control or measuring arrangements specially adapted for combines | |
Control or regulation of milking machines | |
Controlling or regulating processes or operations for continuous casting of metals | |
Automatic control of welding parameters | |
Control systems or devices for copying directly from a pattern or a master model | |
Grinding controlled by patterns, drawings, magnetic tape or the like | |
Control means for lapping machines or devices | |
Measuring or gauging equipment for controlling the feed movement of the grinding tool or work | |
Controlling the flowability, constitution, or other physical characteristics of abrasive blasts | |
Flow- or pressure-control devices or systems for dispensing beverages on draught | |
Control devices specially adapted for fluidised bed combustion apparatus | |
Humidity or temperature control in electrographic, electrophotographic or magnetographic processes | |
Arrangements for controlling dynamo-electric motors or generators |
Attention is drawn to the following places, which may be of interest for search:
Control systems specially adapted for particular apparatuses, machines or processes are classified in the subclasses for the apparatus, machine or process, provided that there is specific provision for control or regulation relevant to the special adaptation, either at a detailed level, (e.g. A21B 1/40: "for regulating temperature in bakers' ovens") or at a general level, (e.g. B23K 9/095: "for automatic control of welding parameters in arc welding"). Controlling aspects of space crafts are excluded from the G05D. They should be classified in B64G 1/244. Otherwise, classification is made in the most appropriate place in this subclass.
Places where there is specific provision of the kind referred to above at a detailed level have been listed under the main groups of this subclass (see "References relevant to classification in this subclass"). Where the provision is at a general level (e.g. of a kind appropriate to more than one of the main groups specified in the lists, or to main groups G05D 27/00 or G05D 29/00), the places are listed under this subclass.
A document that can be applied to two or more applications is not specific for any of them and has to be classified in G05D (for instance a thermostat for heating or air conditioning).
A formulation of the kind "regulator for the application X" should a priori not be considered as specific to said application.
Usually, the subdivisions of the regulation classes in the field of the application are less precise than in G05D, therefore giving a class in G05D may be useful for search.
When in a document there is mention of several controlled variables, one should try to visualize the block scheme of the regulation. The document is then to be classified in the group of the variable controlled in the outer control loop. In case the regulation in one of the other control loops is of particular interest, it should also be classified in the group(s) of the variable(s) concerned.
Note that the above is without prejudice of the limiting references contained in the titles of the different groups and subgroups in this subclass.
In the main groups of this subclass, remarks found under "Further details of subgroups" are not meant to replace the definitions in the titles, but either give further information about the definitions or mention particular types of documents to be classified in the subgroups or to be excluded from them. In case no remark is made on a given subgroup, the title is considered to be self-explanatory.
In G05D, the hierarchy in classification is generally done according:
- to the physical variable
- Then to the nature of the auxiliary power used, with the following possibilities, not used for all the variables:
- without auxiliary power (purely mechanical regulation)
- with auxiliary non-electric power (e.g. pneumatic or hydraulic)
- characterised by the use of electric means
- with combination of electric and non-electric auxiliary power
- Then, to the type of sensor used.
In this place, the following terms or expressions are used with the meaning indicated:
Systems | includes self-contained devices such as speed governors, pressure regulators |
This place covers:
Autonomous, remote or assisted control of the position, course, altitude, depth or attitude of land, water, air or space manned or unmanned vehicles.
Subclass G01C covers measuring distance or height, e.g. measuring distance or height for land vehicles, ships, aircraft and space vehicles. Group G01C 21/00 covers navigation in general, e.g. determining the route to be followed by a vehicle. Group G01C 21/00 also covers determining position or distance traveled using dead reckoning and inertial sensors.
Subclass G08G covers arrangements, located in land, water, air or space vehicles or on the ground, for controlling road vehicles, marine craft or aircraft within a traffic environment, e.g. traffic signals, landing aids or anti-collision systems. Subclass G08G does not cover arrangements for the control of position, course, altitude or attitude of land, water, air or space vehicles, not being specific to a traffic environment, e.g. automatic pilots, which are covered by group G05D 1/00.
Subclass G01S covers systems and devices for determining positions, distances, velocities or directions using radio, optical, acoustic or similar waves. Subclass G01S also covers detecting the presence of an object using these waves.
This main group concerns only the position, course, altitude, depth or attitude control of vehicles as a whole. It does not cover internal adjustments of elements of the vehicles, like for example robotic arms, cranes, gimbal cameras or other types of payloads.
This place does not cover:
Drive control systems specially adapted for autonomous road vehicles |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Steering or guiding agricultural machines or implements | |
Steering for toy vehicles | |
Electrical remote-control arrangements for toy vehicles | |
Stability or attitude control of air-cushion vehicles | |
Purposes of road vehicle drive control systems not related to the control of a particular subunit | |
Control of rail vehicles | |
Steering controls of motor vehicles or trailers, i.e. means for initiating a change of direction | |
Arrangements for automatically controlling the steering depending on driving conditions | |
Active steering aids | |
Attitude or position control of chassis of endless-tracked vehicles | |
Control of attitude or depth of underwater vessels | |
Marine steering; Marine dynamic anchoring | |
Control systems for actuating flying-control surfaces, lift-increasing flaps, air brakes or spoilers of aircraft | |
Attitude, flight direction or altitude control of aircraft by jet reaction | |
Ejector seats | |
Guiding or controlling cosmonautic vehicles | |
Control devices for conveyors | |
Control systems for cranes | |
Control devices for soil-shifting machines | |
Onboard guidance or control of self-propelled or guided missiles | |
Steering control of marine torpedoes |
Attention is drawn to the following places, which may be of interest for search:
Control of position or direction of an object not being a vehicle | |
Control of linear or angular speed or of acceleration | |
Mowers | |
Electric equipment of suction cleaners | |
Program-controlled manipulators | |
Safety devices for propulsion unit control | |
Vehicle fittings, acting on a single subunit only, for automatically controlling vehicle speed | |
Ground or aircraft carrier deck installations | |
Unmanned aerial vehicles | |
Fork lifts | |
Direction control systems for self-propelled missiles | |
Navigation | |
Determining positions, velocities, directions or distances using radio, optical or acoustic waves | |
Total factory control | |
Machine learning | |
Optimisation of routes or paths specially adapted for administration or management purposes | |
Logistics and inventory or stock management | |
Traffic control systems |
In this main group, it is desirable to add the indexing codes of groups G05D 2101/00 - G05D 2111/00. These groups should be used for embodiments which are useful for search purposes, not just for possible alternatives mentioned in a list.
In this place, the following terms or expressions are used with the meaning indicated:
vehicle | is any machine for transporting or moving for other purposes which comprises means for adjusting its position within an environment without being constrained with respect to a fixed location. This covers, e.g. moving robots, land vehicles, ships, submarines, airplanes, drones or space vehicles. |
This place covers:
Control of vehicle position to acquire, maintain or re-acquire a target, e.g. a person or another vehicle, for tracking, following or interdiction purposes.
Attention is drawn to the following places, which may be of interest for search:
Direction control systems for self-propelled missiles | |
Analysis of motion | |
Target detection |
This place covers:
Inputs used by the control system to control the position, course, altitude, depth or attitude of the vehicle. It comprises position, course, altitude or attitude command inputs from an offboard human operator or from an external computer system, as well as onboard and offboard arrangements for determining the position or orientation of the vehicle in relation to its environment used for the specific purpose of position, course, altitude or attitude control. This place further covers allocation of control inputs between offboard and onboard operators and systems.
Attention is drawn to the following places, which may be of interest for search:
Measuring height | |
Gyroscopes | |
Navigation | |
Measuring distance traversed on the ground by vehicles, e.g. using odometers | |
Combined instruments indicating more than one navigational value, e.g. for aircraft; Combined measuring devices for measuring two or more variables of movement, e.g. distance, speed or acceleration | |
Positioning beacons, e.g. LORAN, VOR or TACAN systems | |
Determining the direction from which radio, optical or acoustic waves are being received | |
Determining position or attitude using radio, optical or acoustic waves | |
Details of systems according to groups G01S 13/00, G01S 15/00, G01S 17/00 | |
Determining distance or velocity using radio, optical or acoustic waves and not using reflection or reradiation | |
Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems | |
Systems using the reflection or reradiation of acoustic waves, e.g. Sonar systems | |
Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. Lidar systems | |
Satellite radio beacon positioning systems, e.g. GPS; Determining position, velocity or attitude using signals transmitted by such systems | |
Control devices characterised by mechanical features only | |
Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements | |
Image analysis | |
Image or video recognition of scenes | |
Arrangements for transmitting signals characterised by the use of a wireless electrical link | |
Transmission | |
Details of television systems | |
Wireless communication networks for vehicles |
This place covers:
Position, course, altitude or attitude command input arrangements to the control system of a semi-autonomous, fully autonomous or remote-controlled vehicle. In particular, position, course, altitude or attitude command input arrangements for establishing, influencing or constraining the target position, course, altitude or attitude of the vehicle.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Steering controls for land motor vehicles or trailers | |
Marine steering | |
Initiating means actuated personally for actuating flying-control surfaces, lift-increasing flaps, air brakes or spoilers |
This place covers:
Position, course, altitude or attitude command input arrangements from an offboard operator or from an external computer system.
Feedback arrangements from the vehicle to the offboard operator or external computer system for the purpose of position, course, altitude or attitude control.
Attention is drawn to the following places, which may be of interest for search:
Flight directors |
This place covers:
Networking arrangements or signal aspects of the communication link between an offboard operator or an external computer system and a vehicle for the purpose of position, course, altitude or attitude control.
Attention is drawn to the following places, which may be of interest for search:
Arrangements for transmitting signals characterised by the use of a wireless electrical link | |
Transmission | |
Wireless communication networks specially adapted for vehicles |
This place covers:
Handover of control between multiple offboard operators or external computer systems, or between onboard and offboard operators or external computer systems.
This place covers:
Position, course, altitude or attitude command input arrangements mounted on an unmanned vehicle to be used by operators or systems located off board the vehicle.
This place covers:
Details of position, course, altitude or attitude command input data, e.g. waypoints, to the control system of a vehicle.
Attention is drawn to the following places, which may be of interest for search:
This place covers:
Onboard or offboard arrangements for determining the position or orientation of a vehicle in relation to its environment used for the specific purpose of position, course, altitude or attitude control of the vehicle.
Attention is drawn to the following places, which may be of interest for search:
Altimeters for aircraft | |
Gyroscopes | |
Navigation | |
Measuring distance traversed on the ground by vehicles, e.g. using odometers | |
Positioning beacons, e.g. LORAN, VOR or TACAN systems | |
Determining the direction from which radio, optical or acoustic waves are being received | |
Determining position or attitude using radio, optical or acoustic waves | |
Details of systems according to groups G01S 13/00, G01S 15/00, G01S 17/00 | |
Determining distance or velocity using radio, optical or acoustic waves and not using reflection or reradiation | |
Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems | |
Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems | |
Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems | |
Satellite radio beacon positioning systems, e.g. GPS; Determining position, velocity or attitude using signals transmitted by such systems | |
Image analysis | |
Image or video recognition or understanding of scenes or scheme-specific elements | |
Details of television systems |
In this place, it is desirable to add the indexing codes of group G05D 2111/00 for specifying details of the particular signals, which are useful for search purposes.
This place covers:
Arrangements for determining the position or orientation of the vehicle in relation to a representation or model of the environment for the specific purpose of position, course, altitude or attitude control of the vehicle.
This place covers:
Control arrangements specific for the control of position or course of a vehicle within two dimensions or three dimensions.
Control arrangements specific for the control of altitude, depth or attitude of a vehicle.
This place covers:
Position or course control in two dimensions, for example, over a solid or liquid surface or inside a fluid at constant altitude or depth. The surface may be horizontal, vertical, inclined or uneven, for example.
This place covers:
Control of a vehicle in two dimensions, wherein features of the surface or of the environment, like the presence of inclined planes, stairs or lifts, results in a change in the altitude or depth of the vehicle during the two-dimensional control.
This place covers:
Position or course control in three dimensions for vehicles controllable within three dimensions.
This place covers:
Control in three dimensions of a vehicle having no active propulsion.
In this place, the vehicle that has no active propulsion is considered to be "unpowered" for propulsion purposes, but this vehicle may otherwise have internally-powered elements, e.g. control surface actuators.
This place covers:
Three-dimensional control of a vehicle moving inside a volume defined by physical surfaces, e.g. having solid or liquid surfaces as boundaries, regardless of the size or accessibility of the volume. For example, tanks, pools or buildings.
An open body of water is not considered to be a confined volume for this place.
This place covers:
Control arrangements for achieving a desired altitude, depth, vertical speed or vertical profile.
This place covers:
Attitude control comprising direct isolated or combined control of yaw, pitch and roll.
This place covers:
The intended result of the position, course, altitude, depth or attitude control of a single vehicle or of a coordinated group of vehicles, i.e. the goal or purpose that the position, course, altitude or attitude control of the vehicle is meant to achieve through the control.
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at ensuring safety and protection of the vehicle, its occupants or its environment during operation of the vehicle.
This place does not cover:
Arrangements for controlling the position or course of two or more vehicles for avoiding collisions therebetween | |
Arrangements for reacting to or preventing system or operator failure |
Attention is drawn to the following places, which may be of interest for search:
Arrangements for monitoring atmospheric conditions used in traffic control systems for aircraft |
This place covers:
Controlling the movement of the vehicle in order to prevent or minimize harm or injury to cargo or occupants.
This place covers:
Controlling the movement of the vehicle in order to prevent or minimize the exposure of a vehicle to an attack or detection by hostile entities.
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at detecting objects during travel and modifying the movement of the vehicle to maintain at least a minimum distance to them.
This place does not cover:
Predicting or avoiding probable or impending collision of road vehicles |
Attention is drawn to the following places, which may be of interest for search:
Arrangements for monitoring terrain used in traffic control systems for aircraft |
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at resolving or avoiding situations where the movement of the vehicle is constrained so as to substantially hinder the intended task of the vehicle.
This place covers:
Arrangements for temporarily or permanently removing or relocating obstacles that hinder the movement of the vehicle.
This place covers:
Arrangements for optimisation of travel parameters by modifying the position, course, altitude or attitude control of the vehicle during operation.
Attention is drawn to the following places, which may be of interest for search:
Route searching or route guidance specially adapted for navigation in road networks | |
Optimisation of routes or paths specially adapted for administration or management purposes, e.g. travelling salesman problem |
This place covers:
Arrangements for controlling the position, course, altitude or attitude of the vehicle for optimising payload operation of a component or load carried by the vehicle.
Attention is drawn to the following places, which may be of interest for search:
Control of position, course, altitude or attitude of land, water, air or space vehicles with the intended control result of interaction with payloads or external entities |
This place covers:
Controlling the movement of the vehicle within a space or over a surface to perform a work operation that changes the characteristics of the space or surface.
This place covers:
Controlling the movement of the vehicle by taking into account the physical parameters or characteristics of the working area or space, e.g. boundaries or surface features.
This place covers:
Arrangements for directly controlling, limiting or otherwise influencing the travel speed or acceleration of a semi-autonomous, fully autonomous or remote-controlled vehicle over a route or at a given point or area.
Attention is drawn to the following places, which may be of interest for search:
Control of linear speed; Control of angular speed; Control of acceleration or deceleration |
This place covers:
Arrangements for controlling landing on a moving platform, while it is moving.
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at allowing a desired operation of, or interaction with, internal or external entities to the vehicle.
Controlled ordnance, e.g. missiles or bombs, interacting with external entities is not classified in this place, but is classified in groups F41G 7/00 or F42B 15/01.
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at achieving a desired relative position and orientation at zero relative velocity to an external facility in order to allow interaction between the facility and the vehicle, the external facility typically being cooperative or comprising features for allowing relative positioning of the vehicle.
This place does not cover:
Delivering or retrieving payloads |
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at achieving a target position or orientation of the vehicle for the appropriate release of a payload, e.g. in order to achieve the landing of a parachute at a desired spot, or in order to achieve a desired trajectory for a released missile or torpedo.
Attention is drawn to the following places, which may be of interest for search:
Systems for controlling missiles or projectiles, not provided for elsewhere, for guiding a craft to a correct firing position |
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at placing a payload at a target location or retrieving a payload from a target location.
This place covers:
Position, course, altitude, depth or attitude control of vehicles specifically aimed at achieving a desired position, orientation or course of an implement or another piece of equipment being towed or pushed by the vehicle or suspended from it.
This place covers:
Position, course, altitude, depth or attitude control of a vehicle physically coupled by a tether, e.g. cable, to a fixed or moving entity.
This place does not cover:
Positioning towed, pushed or suspended implements |
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at reducing the distance to a moving uncooperative target to zero, where the final orientation and relative velocity are typically not controlled.
This place does not cover:
Docking at a base station |
This place covers:
Position, course, altitude, depth or attitude control of a vehicle specifically aimed at maintaining a desired relative position with respect to an independently moving target.
This place does not cover:
Pointing payloads towards targets | |
Coordinated control of the position or course of two or more vehicles |
This place covers:
Control of the position or course of each of two or more vehicles in coordination with each other by taking into account the position or course of each of the vehicles.
This place covers:
Arrangements for the coordinated position or course control of two or more vehicles that are substantially different from a point of view of position control or structure. For example, coordinated control of an air vehicle and a land vehicle, coordinated control of a fixed wing aircraft and a rotorcraft, or coordinated control of a holonomic vehicle and a non-holonomic vehicle.
This place covers:
Coordinated position or course control of two or more vehicles for the specific purpose of avoiding collisions between them.
This place covers:
Arrangements for controlling two or more vehicles with the purpose of maintaining a desired relative distance or orientation to each other.
Attention is drawn to the following places, which may be of interest for search:
Platooning in road vehicles |
This place covers:
Arrangements for controlling two or more independently controlled vehicles that are temporarily linked together by a shared payload or a physical coupling.
This place covers:
Processes and systems for allocating the authority for providing commands for the coordinated control of two or more vehicles between one or more of the vehicles or external entities. Includes shared or sequential allocation of the authority.
This place covers:
Coordinated control of the position or course of two or more vehicles, wherein the command signals for the coordinated control are generated by two or more of the vehicles, either sequentially (e.g. by token passing) or simultaneously (e.g. by negotiating between the vehicles).
This place covers:
Coordinated control of the position or course of a group of two or more vehicles, wherein the command signals for the coordinated control are generated centrally by one single vehicle of the group acting as a lead vehicle.
This place covers:
Coordinated control of the position or course of a group of two or more vehicles, wherein the command signals for the coordinated control are generated centrally by an entity external to the group of vehicles.
This place covers:
Safety arrangements relating to position, course, altitude, depth or attitude control of a vehicle for reacting to or preventing abnormal system operation caused by failures or errors of a system or a human operator.
This place does not cover:
Handing over between remote control and on-board control, or handing over between remote control arrangements |
Attention is drawn to the following places, which may be of interest for search:
Ensuring safety in case of road vehicle drive control system failures not related to the control of a particular subunit | |
Interaction between the driver and the road vehicle drive control system not related to the control of a particular subunit | |
Testing of vehicles | |
Electric safety arrangements in general | |
Electric testing or monitoring of control systems | |
Preventing errors by testing or debugging of software | |
Computer-aided design of vehicles | |
Registering or indicating the working of vehicles | |
Alarm systems |
This place covers:
Systems limiting the allowed control by the operator or system, e.g. limiting the control output to an amount less than commanded by the operator of a vehicle when it is determined that there is a risk associated with implementing the commanded output.
This place does not cover:
Limitation of acceleration or structural stress |
This place covers:
Arrangements for achieving a safe degraded operation of a vehicle in response to certain conditions, e.g. limp home mode.
This place covers:
Arrangements for monitoring the performance of the position, course, altitude or attitude control system. A detected performance abnormality may trigger action by the control system or by elements external to the control system, e.g. warnings.
This place covers:
Arrangements for reacting to or preventing system or operator failure, comprising two or more elements of the control system capable of performing the same function redundantly, e.g. redundant sensors, processors or software modules.
This place does not cover:
Control of position, course, altitude, or attitude of land, water, air or space vehicles, e.g. automatic pilot | |
Numerical control to execute positioning |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Controlling mechanisms of shoe machines | |
Control devices specially adapted for positioning tool carriers in forging or pressing | |
Pattern-controlled boring or drilling tools | |
Planing or slotting machines controlled by copying device | |
Controlling electrode to workpiece spacing in electric discharge and electrochemical machining | |
Positioning the workpiece in working by laser, e.g. welding or cutting | |
Positioning the workpiece in soldering, welding or cutting by applying heat locally, not otherwise provided for | |
Positioning the molten metal in soldering or welding, not otherwise provided for | |
Adjusting or stopping spindles in machine tools | |
Automatic control of position of tool or work; Precise positioning of tool or work into particular locations, not otherwise provided for | |
Tools controlled by pattern or master model | |
Equipment for exact control of the starting position in grinding | |
Control arrangements for presses | |
Attitude or position control of chassis of tracked vehicles | |
Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating web-advancing mechanisms | |
Control of dipper or bucket positions in dredgers | |
Fluid-pressure servomotors with follow-up action, i.e. in which the position of the actuated member conforms with that of the controlling member | |
Tracking of solar heat collectors | |
Positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces in photomechanical production of patterned or textured surfaces | |
Controlling the position of the rotating heads in information storage systems | |
Means for moving control elements in nuclear reactors to desired positions |
Attention is drawn to the following places, which may be of interest for search:
Control of linear or angular speed or of acceleration | |
Program-controlled manipulators |
Attention is drawn to the following places, which may be of interest for search:
Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors |
This place covers:
Control of thickness or size of material
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Control devices for tobacco cutting | |
Control of the thickness of coating of fluent material on a surface | |
Control of the thickness, width, diameter or other transverse dimensions of the products of metal-rolling mills | |
Regulating dimensions of molten glass ribbon | |
Regulating the thickness of layers in paper making |
This place covers:
Control of flow of liquids, gases, particulate matter and other fluent materials by action on throttling means and/or flow sources.
Further details of subgroups:
This subgroup covers valves where the flexible member itself, e.g. a membrane, acts on the valve seat.
This subgroup covers for example flexible members having the form of a torus.
This subgroup covers valves with a piston having one extreme facing the inlet chamber and an opposite extreme facing the outlet chamber.
These subgroups cover valves in which at least part of the piston has the form of a cylindrical sleeve in contact with and sliding over a fixed or moving stem. They also cover valves in which the control chamber comprising the biasing member is surrounded by the controlled fluid
This subgroup covers valves using calibrated orifices for achieving a constant flow.
These subgroups cover systems where the target flow is defined in dependence on a specific parameter, e.g. the speed of a vehicle.
This place does not cover:
Level control | |
Control of flow ratio |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Controlling the air quantity in hair drying helmets | |
Controlling flow of media to the human body | |
Controlling flow of gases or vapour in electrostatic separators | |
Control of fluent material in coating devices | |
Flow-control devices in apparatus or devices for dispensing beverages on draught | |
Automatic means for reducing or intermittently interrupting flow for transferring liquids from bulk storage containers or reservoirs into vehicles or into portable containers | |
Controlling gas flow through gas purifiers | |
Controlling flow of drilling fluid for flushing boreholes | |
Controlling the flow of the obtained fluid to or in wells | |
Controlling by varying flow non-positive-displacement machines or engines | |
Controlling lubrication pressure or quantity | |
Control of coolant flow for cooling machines or engines in general, or for internal-combustion engines | |
Control of gas-turbine working fluid flow | |
Throttle passages in pipes | |
Controlling air flow rate in air treatment arrangements | |
Controlling of air or gas flow in dryers | |
Controlling the rate of feed or discharge in continuous flow weighing apparatus | |
Control of nuclear power plant by varying flow of coolant |
Within this subgroup, an invention is classified in the last appropriate place.
This place covers:
Control of quantity of liquids or particulate matter in a vessel by action on the input and/or the output flow.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Controlling the liquid level in sedimentation arrangements | |
Ink level control devices | |
Controlling water level for boilers | |
Controlling level of liquid in liquid pool electrodes in electric discharge tubes or lamps |
This place covers:
Control of the relative ratio of flow rate or of volume of two or more fluent materials by action on throttling means and/or flow sources.
Further details of subgroups:
This subgroup also covers systems using interconnected pistons.
This subgroup covers systems comprising venturi aspirators.
This subgroup covers systems where the motor of the pump acting on the feeding of a fluid is operated by another fluid.
Subgroups G05D 11/001 - G05D 11/008 are used in preference to G05D 11/03, also for flow ratio control systems without auxiliary power.
Systems aiming at regulating a temperature by mixing hot and cold water are only classified in G05D 23/13 and subgroups.
This place does not cover:
Control of chemical or physico-chemical variables, e.g. pH-value | |
Control of humidity | |
Control of temperature by varying the mixing ratio of two fluids having different temperatures | |
Control of viscosity |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Density control in sedimentation arrangements | |
Forming predetermined ratios of substances to be mixed | |
Controlling the flowability of abrasive blasts | |
Controlling the operation of apparatus for producing mixtures of clays or cements | |
Control devices for bulk material conveyors | |
Controlling the flow ratio in jet-propulsion plants |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Controlling drum speed in metal drawing | |
Control of cutting velocity of tool or work | |
Controlling ram speed in presses | |
Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed | |
Devices for controlling the propulsion of electrically-propelled vehicles | |
Road vehicle cruise control | |
Control of cruising speed of aircraft | |
Control of feed rate in manufacture of artificial filaments, threads, fibres, bristles or ribbons | |
Speed control arrangements in carding machines | |
Automatically controlled speed driving mechanism in warping, beaming or leasing machines | |
Cyclically varying speed of looms | |
Control of speed of fluid carrier in chemical analysis | |
Controlling the speed of record carriers of filamentary or web form in information storage systems | |
Controlling the speed of record carriers not specifically of filamentary or web form in information storage systems |
Attention is drawn to the following places, which may be of interest for search:
Transducers converting variations of physical quantities into fluid-pressure variations |
Attention is drawn to the following places, which may be of interest for search:
Fluid-pressure converters |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Control devices for adjusting the force in portable percussive tools | |
Controlling ram pressure in presses | |
Controlling tension in webs, tapes, or filamentary material | |
Controlling tension in filamentary material | |
Control devices for rope, cable or chain tension in load moving winding or unwinding mechanisms | |
Control of the tension in looms | |
Automatically-controlled tensioning devices in sewing machines | |
Means for regulating the pressure in paper-making machines | |
Controlling the tension during drying fabrics | |
Controlling the pressure of air or other gases for drying solid materials or objects | |
Control of record carrier tension in information storage arrangements |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Devices for controlling tyre pressure | |
Control of air pressure within diving suit | |
Automatic control of aircraft air-pressure | |
Control devices, e.g. for controlling gas pressure, for preventing jamming of material in bulk material conveyors | |
Control of pressure in the treatment of filament-forming material | |
Controlling pressure of drilling fluid for flushing boreholes | |
Controlling lubricant pressure | |
Control of pressure of fluid carrier in chemical analysis | |
Means for obtaining or maintaining pressure in electric discharge tubes or lamps | |
Means for obtaining or maintaining pressure in electric incandescent lamps |
Attention is drawn to the following places, which may be of interest for search:
Valves per se |
Groups G05D 16/02, G05D 16/024 and G05D 16/028
These groups describing functional aspects of the invention are generally used in combination with groups G05D 16/04 - G05D 16/2097 describing structural aspects of the valves.
Group G05D 16/028
This group covers valves controlling a difference between two systems pressures, excluding the following cases:
- When one of the pressures is the ambient (atmospheric) pressure or any other uncontrolled pressure that is external to the system; in this case only the structural aspects of the valve are classified in groups G05D 16/04 – G05D 16/2097.
- When the controlled pressures are across a fixed or adjustable restriction for the purpose of flow regulation, in which case the document should be classified in G05D 7/00; and
- When one of the pressures is a reference pressure generated by a pilot valve or any other means for the purpose of keeping the other pressure at a difference to said reference pressure, in which case the document should be classified either in G05D 16/14 or in G05D 16/2093.
Groups G05D 16/0402 and G05D 16/0404
These groups are used in combination with groups G05D 16/06 – G05D 16/12 describing one or more of the valves.
Attention is drawn to the following places, which may be of interest for search:
Vibration-dampers |
This place covers:
- Valves in a series, where the output of one valve is the input of another one.
This place covers:
- Valves having their inputs and/or outputs connected together.
This place covers:
- Valves comprising a piston or plunger, which reacts to fluid pressure in contact therewith.
This place covers:
- Valves comprising a piston having one extreme facing the inlet chamber and an opposite extreme facing the outlet chamber, for example:
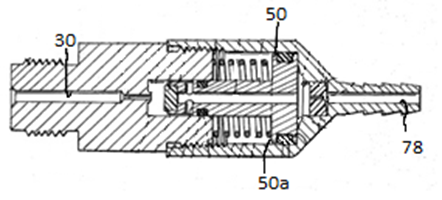
Figure 1. A piston 50 having one extreme 50a facing the inlet 30 and an opposite extreme facing the outlet chamber 78.
This place does not cover:
Multiple-way valve |
This place covers:
- Valves in which at least part of the piston has the form of a cylindrical sleeve in contact with and sliding over a fixed or moving stem.
- Valves in which the control chamber comprising the biasing member is surrounded by the controlled fluid, for example:

Figure 1. A part 30 of the piston 23 has the form of a cylindrical sleeve in contact with and sliding over a fixed stem 29. Furthermore, the control chamber 25a comprising the biasing member 37 is surrounded by the controlled fluid.
This place covers:
- Valves having a detached obturator that is biased against the sensing piston so that they move together over the range of motion during normal operations, for example:
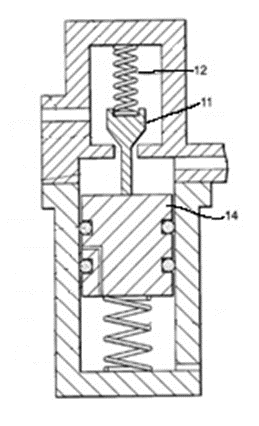
Figure 1. A detached obturator 11 is biased by the auxiliary spring 12 against the sensing piston 14 so that they move together over the range of motion during normal operations.
This place covers:
- Valves comprising two or more pistons that move independently of each other over the range of motion during normal operation, at least one of them being the sensing element.
This place does not cover:
Control of fluid pressure without auxiliary power with two or more controllers mounted in series | |
Control of fluid pressure without auxiliary power with two or more controllers mounted in parallel |
This place covers:
- Valves in which the controlled pressure is compared to a reference fluid pressure generated by means of an auxiliary pilot valve or any other means.
This group may be used in combination with groups G05D 16/06 – G05D 16/12 describing structural details of the auxiliary pilot valve.
This place covers:
- Electric energy acting on the main valve, and
- Electric energy acting on the control element of the pump
This place does not cover:
With combination of electric and non-electric auxiliary power |
This place covers:
- Systems controlling the pressure using the electromagnetic valves.
Electromagnetic valves allowing only on/off operation are only classified in this group.
This place covers:
- Electromagnetic valves generating an intermediate closing force that is proportional to the current supplied.
This place does not cover:
The throttling means being a multiple-way valve |
This group may be used in combination - with groups G05D 16/202 - G05D 16/2024 to describe one or more of the valves.
This place covers:
- Valves where the electric energy is used for an auxiliary function of an otherwise purely mechanical regulator, e.g. adjusting the set point.
This place does not cover:
With combination of electric and non-electric auxiliary power |
This place covers:
- Valves in which the controller pressure is compared to a reference fluid pressure generated by means of an electromagnetic pilot valve or any other means.
This group may be used in combination with subgroups G05D 16/202 - G05D 16/208 describing structural details of the auxiliary pilot valve.
This place covers:
Regulation of the torque of tightening tools, control of the torque or power of electric motors, combustion engines and the like when the control is not specific of the particular drive.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Torque limiters in tools | |
Propulsion units in vehicles | |
Control of combustion engines | |
Control of electric motors |
This place covers:
Control of mechanical oscillations or vibrations in machines or structures, either by generating oscillations, or by damping oscillations, other than suppression of vibrations.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Control devices for adjusting the frequency of portable percussion tools | |
Controlling means for the frequency of the jigging movement of jigging conveyors | |
Suppression of vibrations in systems | |
Musical instruments; acoustics | |
Loudspeakers or like acoustic electromechanical transducers |
This place covers:
Regulation of chemical composition, concentration, pH or the like in a chemical process when the regulation is not specific of the particular process.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Controlling density in sedimentation arrangements | |
Controlling separation of gases or vapours by gas-analysis apparatus | |
Control of fluid composition, e.g. gradient, of fluid carrier in chemical analysis |
Attention is drawn to the following places, which may be of interest for search:
Ratio control | |
Humidity control | |
Control of viscosity | |
Physical or chemical processes in general | |
Treatment of water |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Control of watering for watering gardens, fields, sports grounds or the like | |
Controlling humidity in poultry incubators | |
Control of the moisture content of tobacco products | |
Moistening in air treating devices of vehicles | |
Control arrangements for air conditioning | |
Controlling humidity of the gas supply in arrangements for supplying or controlling air or other gases for drying solid materials or objects |
This place covers:
Control of temperature
Further details of subgroups:
These subgroups cover valves controlling the flow of a fluid as a function of the temperature of said fluid.
These subgroups cover valves controlling the flow of a fluid as a function of the temperature of an external sensor, e.g. thermostat for radiator.
G05D 23/024 and subgroups
These subgroups cover memory shape alloys working as a sensing element.
This subgroup covers systems where the fusing of an element irreversibly releases a cooling fluid.
This subgroup covers valves controlling the flow of fuel to a burner as a function of the temperature of a controlled space.
This subgroup covers valves distributing the flow of a fluid among two conduits as a function of the temperature of said fluid, e.g. refrigerating systems.
This subgroup covers not only valves where the flow is regulated, but also where it is just set by the user.
G05D 23/185 and subgroups
These subgroups cover valves similar to the corresponding subgroups in G05D 23/01, but further comprising the use of auxiliary pneumatic or hydraulic energy.
G05D 23/19 and subgroups
In G05D 23/19 documents are classified in G05D 23/20, G05D 23/22, G05D 23/24, G05D 23/26, G05D 23/27, or G05D 23/275 and their subgroups according to the nature of the main temperature sensor used. Additionally, documents are also classified in the CPC subgroups G05D 23/1902 - G05D 23/1951 relating to control features, if one or more them apply. In case the nature of the temperature sensing element is not mentioned or is irrelevant for the invention, documents are classified only in G05D 23/19 or in one of more subgroups G05D 23/1902 - G05D 23/1951.
G05D 23/20 and subgroups
This covers inventions where the sensing element has a variation of electric or magnetic properties other than defined in G05D 23/22, G05D 23/24 or G05D 23/26, e.g. a semiconductor, an ionized gas or a capacitor.
This subgroup covers inventions relating to the input means of the reference value.
This subgroup covers systems where a temperature profile is defined as a function of time.
This subgroup covers systems where the control action is a continuous function of the measured error.
This subgroup covers systems delivering a series of pulses having a frequency that is a continuous function of the measured error.
This subgroup covers systems using Peltier effect devices.
This subgroup covers systems where the actuator consists of a heat expanding element being heated electrically in order to act on a valve.
This subgroup covers control systems for storage heaters.
This subgroup covers systems using solar energy.
This subgroup covers systems measuring the temperature of the controlled space and of another space in thermal relationship with it, e.g. outdoors.
This subgroup covers systems where one sensor is used for control after the other, e.g. measuring the input flow temperature of a heating system and later switching to measuring the output flow temperature.
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Means for regulating the temperature of bakers' ovens | |
Devices for controlling the temperature of hair curlers | |
Control devices for metal extruding, e.g. for regulating temperature of metal | |
Temperature control means for lapping machines or devices | |
Devices for controlling tyre temperature | |
Arrangements for controlling temperature of cosmonautic vehicles | |
Controlling the temperature of the float baths or of the atmosphere above the float baths in glass making | |
Control of temperature in the treatment of filament-forming or like material | |
Devices for controlling temperature of parts of knitting machines | |
Temperature control of hand irons | |
Regulating temperature of the dryer section in paper-making machines | |
Controlling temperature of lubricants | |
Controlling the supplying oil or unspecified lubricant from a reservoir by means of temperature | |
Controlling superheat temperature for superheating of steam | |
Control of central heating systems | |
Control of temperature in arrangements for supplying or controlling air or other gases for drying solid materials or objects | |
Control of temperature of fluid carrier in chemical analysis | |
Temperature of electric storage cells | |
Control of temperature in dielectric, induction or microwave heating | |
Controlling the temperature of anode of X-ray tubes |
Attention is drawn to the following places, which may be of interest for search:
Control of air-humidification systems | |
Thermal management of data-processing equipment | |
Automatic switching arrangements for electric heating apparatus | |
Modifications of constructional details to facilitate cooling, ventilating, or heating of electrical apparatus |
Within subgroups G05D 23/01 - G05D 23/32, an invention is classified in the last appropriate place in the absence of an indication of the contrary.
This place covers:
Regulation of intensity, colour or phase of light other than by acting on the light sources.
This place does not cover:
Optical devices or arrangements using movable or deformable elements for controlling light independent of the light source | |
Devices or arrangements, the optical operation of which is modified by changing the optical properties of the medium of the devices or arrangements for the control of light, circuit arrangements specially adapted therefor, control of light by electro-magnetic waves, electrons or other elementary particles |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Control devices associated with light sources in photographic composing machines | |
Controlling the intensity, frequency, phase, polarisation or direction of the emitted radiation of lasers | |
Circuit arrangements for operating electroluminescent light sources, incandescent light sources, discharge lamps, light emitting diodes, light sources using a charge of combustible material or light sources in general |
If there is a double regulation (two independent set points for two corresponding controlled variables, e.g. temperature and humidity, when there are interactions in the control loops), the document is also classified in this group. Thus, this group should be assigned in addition to the groups corresponding to the two or more controlled variables.
If there is a double regulation (two independent set points for two corresponding controlled variables, when there are interactions in the control loops), the document is also classified in this group. Thus, this group should be assigned in addition to the groups corresponding to the two or more controlled variables.
This group is not being used.
This place covers:
Vehicles designed to make a surface or a region free of dirt, marks or contaminants, especially by washing, wiping, brushing, vacuuming or polishing.
Vehicles designed for air cleaning, disinfection or sterilisation.
This place covers:
Vehicles designed to remove undesired objects from a location, e.g. removing garbage or tidying.
This place covers:
Vehicles designed to move objects, animals or humans from one location to another in an indoor or outdoor environment.
This place covers:
Vehicles designed to transport a human as a driver or a passenger.
This place covers:
Motorised non-road vehicles intended for transport of a single human as a driver or a passenger, e.g. skateboards, wheelchairs or self-balancing scooters.
This place covers:
Vehicles designed to transport cargo, e.g. cargo aircraft, freight trains, lorries, delivery vehicles, forklifts or freighters.
This place covers:
Outdoor spaces reserved for vehicle traffic and regulated by a public authority.
Attention is drawn to the following places, which may be of interest for search:
Transportation hubs |
This place covers:
Confined spaces not easily accessible to humans.
This place covers:
Vehicles designed for moving on a solid surface, e.g. extra-terrestrial land rovers.
This place covers:
Vehicles configured to travel along a grid of physical or visual elements, e.g. tracks or markings.
This place covers:
Vehicles designed for climbing or moving on a substantially vertical solid surface.
This place covers:
Fixed wing aircraft capable of taking off and landing vertically, or of taking off from or landing on a short runway.
Attention is drawn to the following places, which may be of interest for search:
Flying platforms |
In patent documents, the following abbreviations are often used:
STOL | short take-off and landing (aircraft) |
STOVL | short take-off and vertical landing (aircraft) |
VTOL | vertical take-off and landing (aircraft) |
This place covers:
Aircraft having two or more separate modes of operation for generating lift, e.g. aircraft having fixed wing and rotary wing modes.
This place covers:
Aircraft generating lift from rotating blades, such as helicopters or autogyros.
This place covers:
Aircraft having one or more rotors generating a lifting thrust, wherein attitude control is provided by differential rotor thrust control or a separate force generated outside of the rotors.
Illustrative example of subject matter classified in this place:
1a.
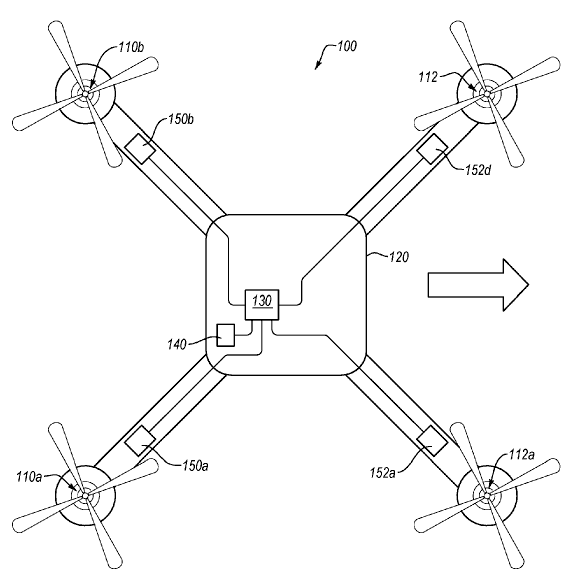
Figure 1a illustrates a top view of an aircraft having one or more rotors.
1b.
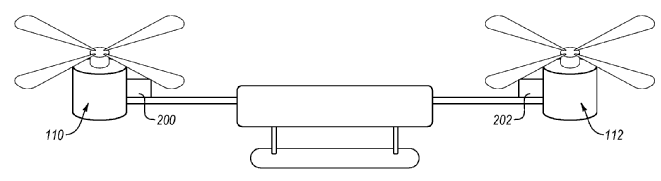
Figure 1b illustrates a side view of an aircraft having one or more rotors.
Attention is drawn to the following places, which may be of interest for search:
Vertical take-off and landing [VTOL] aircraft; Short take-off and landing [STOL, STOVL] aircraft |
This place covers:
Vehicles designed to operate outside of a celestial body, e.g. asteroid or planet, and its atmosphere.
Attention is drawn to the following places, which may be of interest for search:
Land vehicles, e.g. extra-terrestrial land rovers |
This place covers:
The type of signal used for determining position or orientation during control of position, course, altitude, depth or attitude of a vehicle.
Attention is drawn to the following places, which may be of interest for search:
Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions or position lines fixed relatively to the beacon transmitters using radio waves | |
Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions or position lines fixed relatively to the beacon transmitters using electromagnetic waves other than radio waves | |
Beacons or beacon systems transmitting signals having a characteristic or characteristics capable of being detected by non-directional receivers and defining directions, positions or position lines fixed relatively to the beacon transmitters using ultrasonic, sonic or infrasonic waves | |
Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves or particle emission, not having a directional significance, are being received using radio waves | |
Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves | |
Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic or electromagnetic waves or particle emission, not having a directional significance, are being received using ultrasonic, sonic or infrasonic waves | |
Position-fixing by co-ordinating two or more direction or position-line determinations or position-fixing by co-ordinating two or more distance determinations using radio waves | |
Position-fixing by co-ordinating two or more direction or position-line determinations or position-fixing by co-ordinating two or more distance determinations using electromagnetic waves other than radio waves | |
Position-fixing by co-ordinating two or more direction or position-line determinations or position-fixing by co-ordinating two or more distance determinations using ultrasonic, sonic or infrasonic waves | |
Systems details using the reflection or reradiation of radio waves, e.g. radar systems or analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified | |
Systems details using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems | |
Details of radio direction-finding, radio navigation, determining distance or velocity by use of radio waves, locating or presence-detecting by use of the reflection or reradiation of radio waves or analogous arrangements using reflection of acoustic waves | |
Systems for determining distance or velocity not using reflection or reradiation using radio waves | |
Systems for determining distance or velocity not using reflection or reradiation using electromagnetic waves other than radio waves | |
Systems for determining distance or velocity not using reflection or reradiation using ultrasonic, sonic or infrasonic waves | |
Systems using the reflection or reradiation of radio waves, e.g. radar systems or analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified | |
Systems using the reflection or reradiation of radio waves, e.g. radar systems, or analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified using transponders powered from received waves, e.g. using passive transponders | |
Radio direction-finding, radio navigation, determining distance or velocity by use of radio waves, locating or presence-detecting by use of the reflection or reradiation of radio waves or analogous arrangements using reflection of acoustic waves | |
Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems | |
Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems | |
Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement | |
Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system | |
Wireless communication networks, e.g. signals for communication purposes |
This group should only be used in combination with a corresponding group in G05D 1/24 and in the case when the type of signal is used in the control of position, course, altitude, depth or attitude of a vehicle.
This place covers:
Details of radio signals used for control of position, course, altitude or attitude of land, water, air or space vehicles.
In this place, microwave signals are considered as a type of radio signal.
This place covers:
Details related to using transmission signals transmitted by communication networks to determine the position or orientation of a vehicle in order to control the position, course, altitude or attitude of the vehicle, the communication networks being originally intended for a different purpose other than position or orientation determination.
In patent documents, the following abbreviations are often used:
WLAN | wireless local area networks |
This place covers:
Combining two or more signals of the same type generated sequentially and the combined signals being used for control of position, course, altitude or attitude of a vehicle by identifying common features in the combined signals.
Attention is drawn to the following places, which may be of interest for search:
Control of position, course, altitude or attitude of land, water, air or space vehicles including arrangements for determining position or orientation using environment maps, e.g. simultaneous localisation and mapping [SLAM] |