CPC Definition - Subclass B25J
This place covers:
Handling tools, devices, or machines having a gripping or work head capable of bodily movement in space and of change of orientation, such bodily movement and change of orientation being controlled, at will, by means remote from the head. The group B25J 21/00 moreover covers chambers provided with manipulation devices.
Most of the manipulators classified in B25J are industrial robots.
The International Organization for Standardization gives the following definition of an industrial robot in ISO 8373:
an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications.
This definition is used by the International Federation of Robotics, the European Robotics Research Network (EURON) and many national standards committees.
Here is a list of other types of manipulators or robots classified in B25J, i.e. manipulators which are usually not industrial robots:
Manipulators positioned in space by hand | |
Manipulators not otherwise provided for | |
Leader-follower manipulators | |
Manipulators mounted on wheels or on carriages | |
Micromanipulators | |
Service robots | |
Exoskeletons | |
Manipulators moved by gravity | |
Manipulators comprising mechanical "programming" means, e.g. cams | |
Cellular, reconfigurable manipulators, e.g. cebot |
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Manipulators for surgery | |
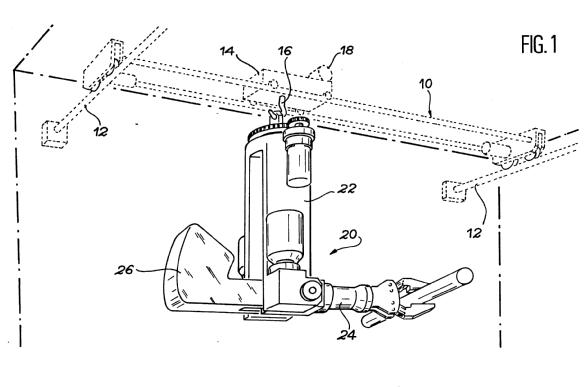
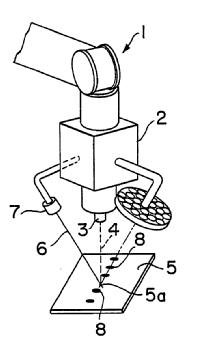
Spray heads moved by robots or articulated arms, e.g. for applying liquid or other fluent material to 3D surfaces | |
Manipulators for transferring metal sheets from / to a press | |
Manipulators in machines for forging, hammering, pressing riveting | |
Manipulators for moving laser head in more than two directions | |
Manipulators for moving workpieces between mould parts | |
Manipulators in machines for gluing by wetting | |
Manipulators for handling sheets | |
Manipulators for stacking or de-stacking articles | |
Manipulators with gripping or holding means for transferring the packages from one station to another | |
Manipulators for underwater operations | |
Automatic analysis systems comprising robots | |
Manipulators integrated in shielded cells | |
Pick and place apparatus for mounting of components | |
Manipulators for transferring wafers |
This place covers:
Illustrative example of subject matter classified in this group:
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Devices for picking apples or like fruits | |
Reaching devices in a shop | |
Pliers; Other hand-held gripping tools with jaws on pivoted limbs | |
Hand-held gripping tools other than those covered by group B25B 7/00 | |
Hand implements for removing undesirable matter, e.g. litter pickers |
Attention is drawn to the following Fterms (Japanese classification scheme), which may be of interest for search:
Tool hands | 3C007/XF05 |
Support hands | 3C007/XF06 |
Attention is drawn to the following places, which may be of interest for search:
Shielded cells or rooms in structural combination with remotely controlled apparatus, e.g. with manipulators |
Manipulators of leader-follower type should additionally be classified in B25J 3/02.
In patent documents the following expression/word "telemanipulator" is often used.
This place covers:
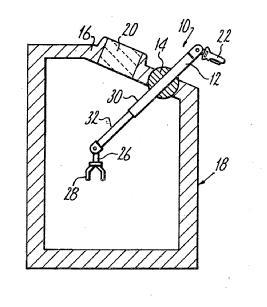
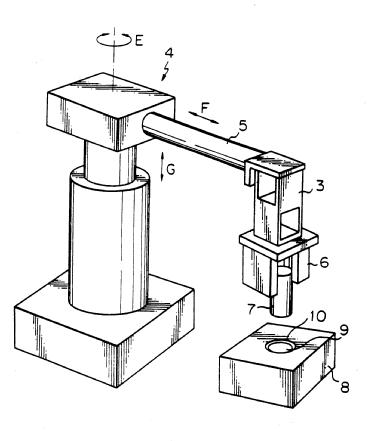
Manipulators which are moved in space by hand and which are attached to the ground or the ceiling.
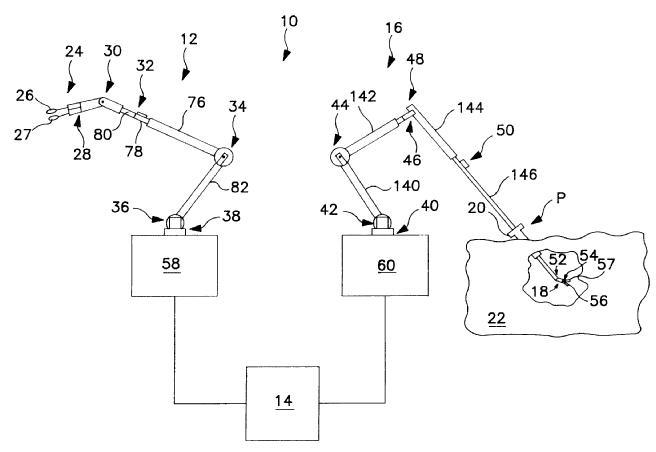
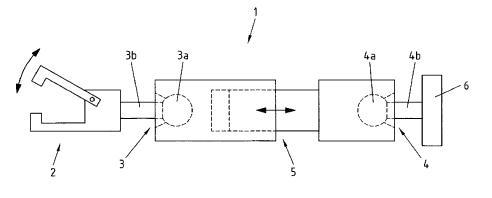
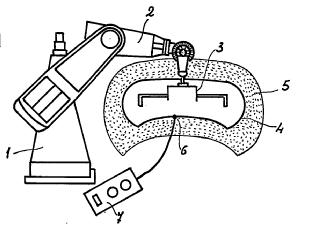
This place covers:
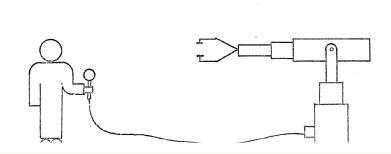
Manipulators consisting of a leader unit for inputting the movements of a user and a remote follower unit, connected to the leader unit, for performing movements corresponding to the input movements.
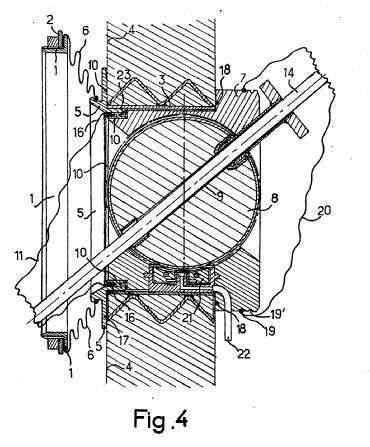
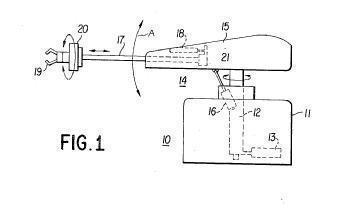
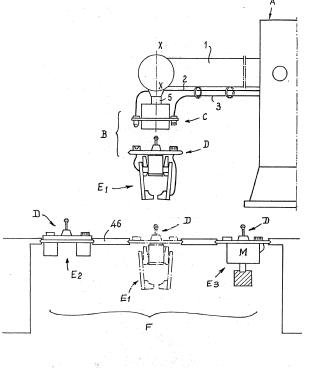
This place covers:
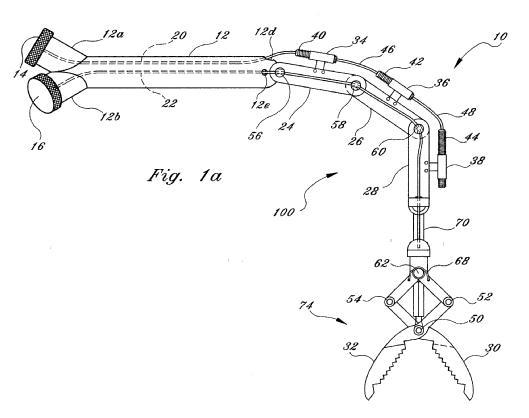
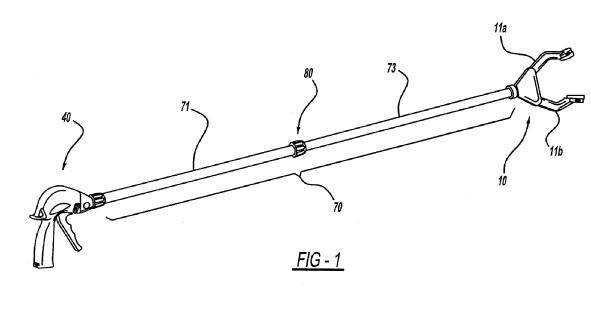
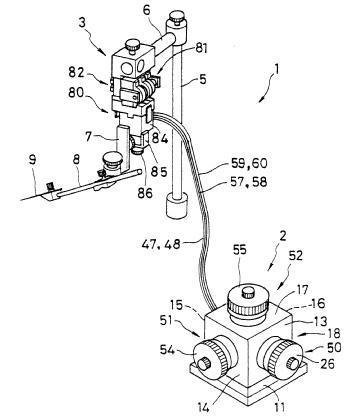
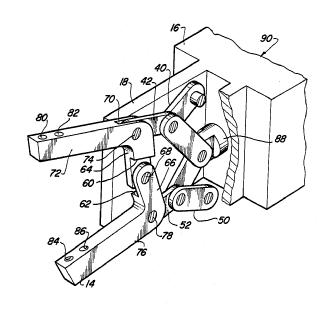
Leader-follower manipulators having a mechanical connection between the leader unit and the follower unit (e.g. connection by shafts, rods, wires, etc).
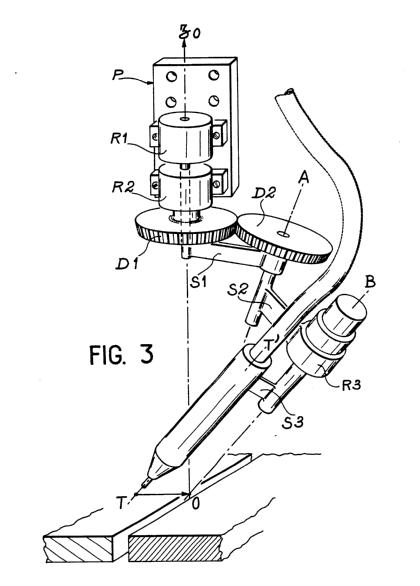
Illustrative example of subject matter classified in this place:

This place does not cover:
Pantographic instruments |
Attention is drawn to the following places, which may be of interest for search:
Manual leader-follower manipulators mounted in a wall |
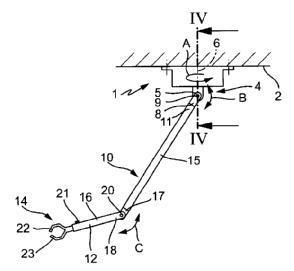
This place covers:
Leader-follower manipulators having an electrical connection between the leader unit and the follower unit (i.e. the movements of the leader unit are transformed into electrical signals for controlling actuators of the slave unit).
Illustrative example of subject matter classified in this group:
This place does not cover:
Control systems of leader-follower manipulators | |
Leader part in the form of hand-grip control means |
Attention is drawn to the following places, which may be of interest for search:
Manipulators specially adapted for use in surgery |
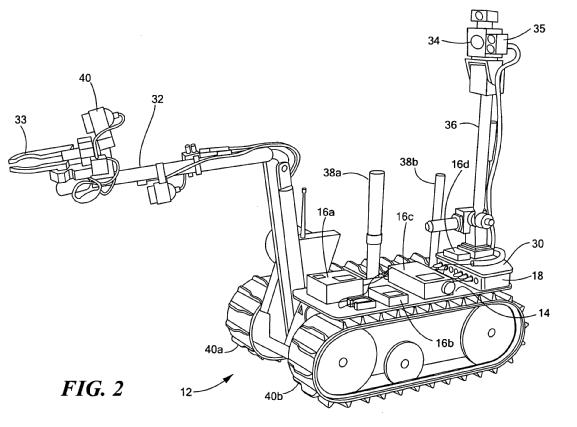
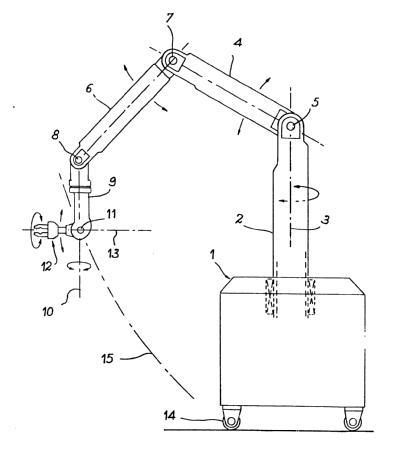
This place covers:
Mobile manipulators, meant to work at different locations.
Attention is drawn to the following places, which may be of interest for search:
Walking robots |
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Endless track vehicles |
In patent documents, the following words/expressions are often used as synonyms:
- (DE)"raupenkette", "gleiskette" and (FR)"chenilles"
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Home robots should additionally be classified in B25J 9/0003.
This place covers:
Illustrative example of subject matter classified in this group:
This place does not cover:
Cartesian coordinate type manipulators |
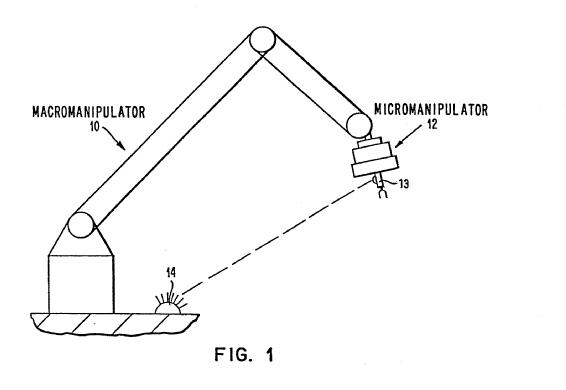
This place covers:
Manipulators performing tasks at a level of precision that can usually not be achieved by the unaided human hand.
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Microstructural devices or systems | |
Nanostructures | |
Piezoelectric devices |
This place covers:
Manipulators performing a series of actions corresponding to a list of instructions.
This place covers:
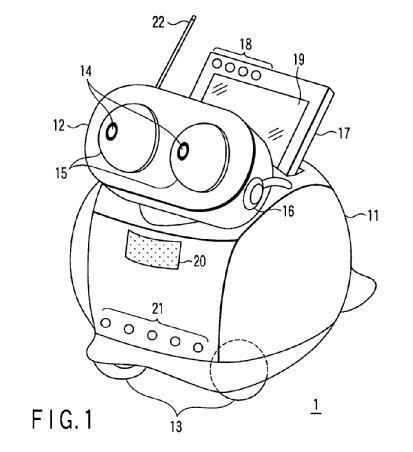
Robots which operates semi- or fully autonomously to perform services useful to the well-being of humans and equipment, excluding manufacturing operations.
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Home robots mounted on wheels or tracks should additionally be classified in B25J 5/00.
In patent documents, the following words/expressions are often used as synonyms:
- "service robots", and "domestic robots"
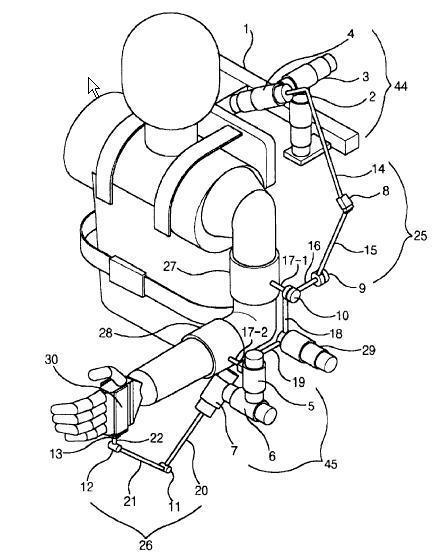
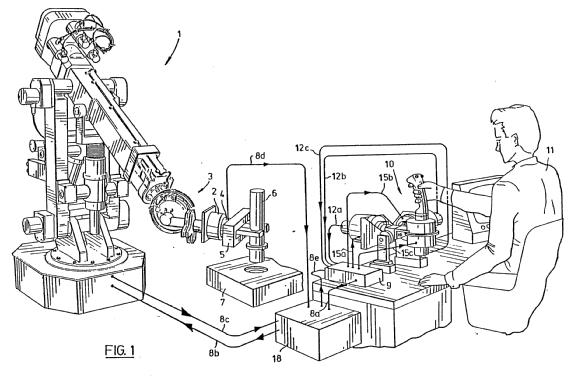
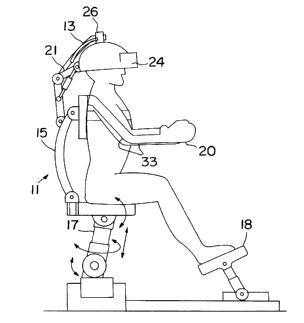
This place covers:
Powered mobile machines consisting primarily of a skeleton-like framework worn by a person and a power supply that supplies at least part of the activation-energy for limb movement.
US 6301526
Attention is drawn to the following places, which may be of interest for search:
Orthopaedic devices specially adapted for correcting deformities of the limbs or for supporting them | |
Apparatus for passive stretching or bending of the lower limbs | |
Apparatus for passive stretching or bending of the upper limbs | |
Suspension devices for supporting the body of disabled persons in an upright walking or standing position | |
Walking robots | |
Input/output arrangements in interaction with the human body for transferring data to be processed |
This place covers:
Illustrative example of subject matter classified in this group:
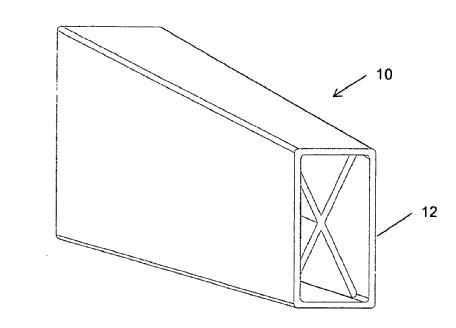
This group relates to, but is not limited to, providing a design solution that overcomes the heavy weight of robot structures that are expected to handle heavy payloads with high speeds through complex spatial trajectories at a long reach while preserving high positional accuracy and dynamic performance, by applying composite materials to robot structures.
In this place, the following terms or expressions are used with the meaning indicated:
Synthetic materials | Man-made materials made of artificial chemicals as opposed to organic ones. They include plastics (polythene, polystyrene), synthetic fibres (nylon, acrylics, polyesters), synthetic resins and synthetic rubber |
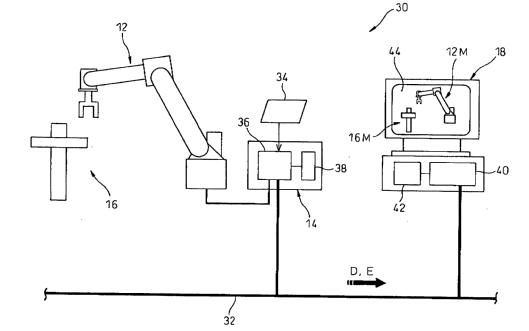
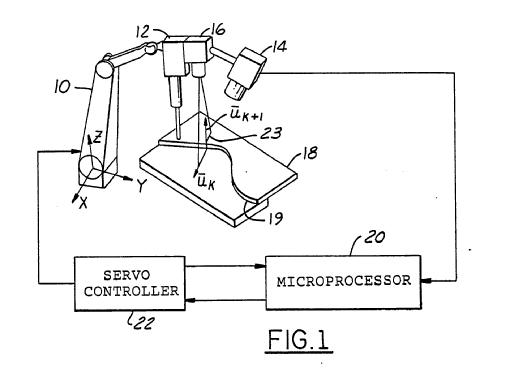
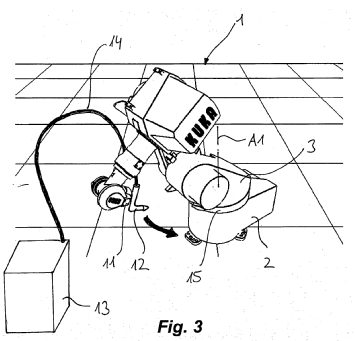
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Teaching successive positions by walk-through, i.e. the tool head or end effector being grasped and guided directly to follow a path |
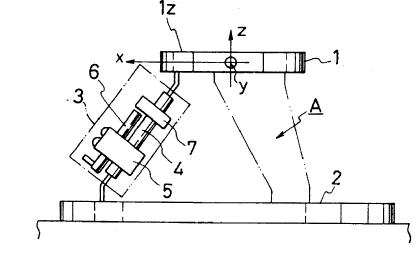
In this place, the following terms or expressions are used with the meaning indicated:
Leader teach-in means | Devices manually moved in space by an operator for teaching the path of a manipulator. |
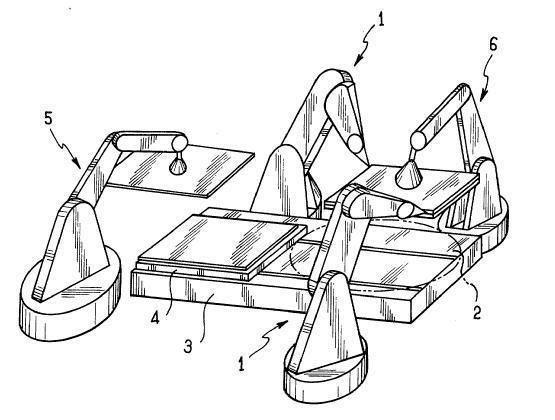
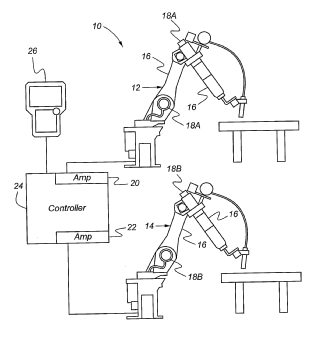
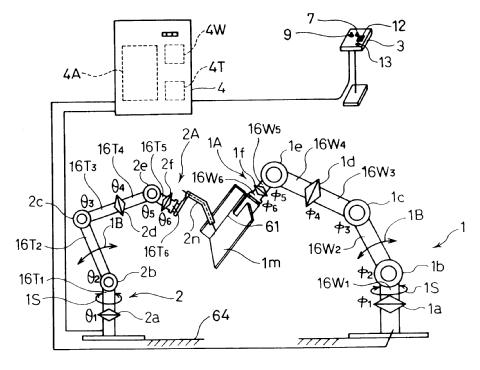
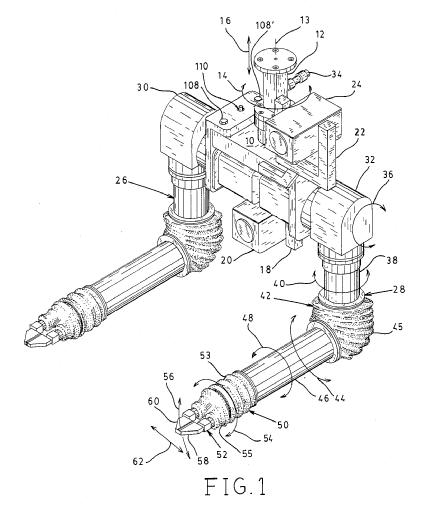
This place covers:
Both robotic installation comprising several manipulators and manipulators comprising two arms connected to a single basis.
Illustrative example of subject matter classified in this group:
This place does not cover:
Humanoid robots having two arms (mostly in) |
This place covers:
Illustrative example of subject matter classified in this group:
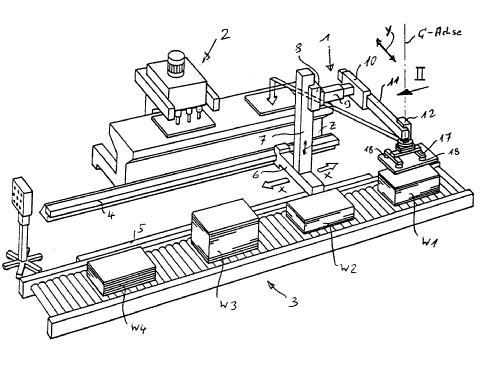
Attention is drawn to the following places, which may be of interest for search:
Programme-control systems consisting of manipulators and conveyor only |
This place covers:
Illustrative example of subject matter classified in this group:
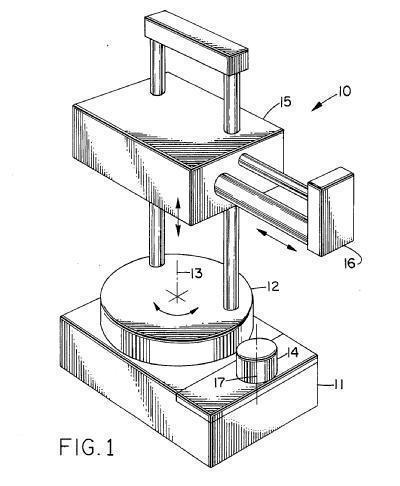
This place covers:
Manipulators consisting of prismatic joints connected in series and allowing movements along perpendicular axis.
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Movable work or tool support with a single sliding pair followed perpendicularly by a single sliding pair |
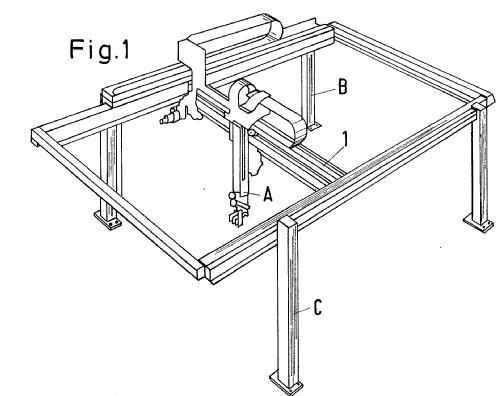
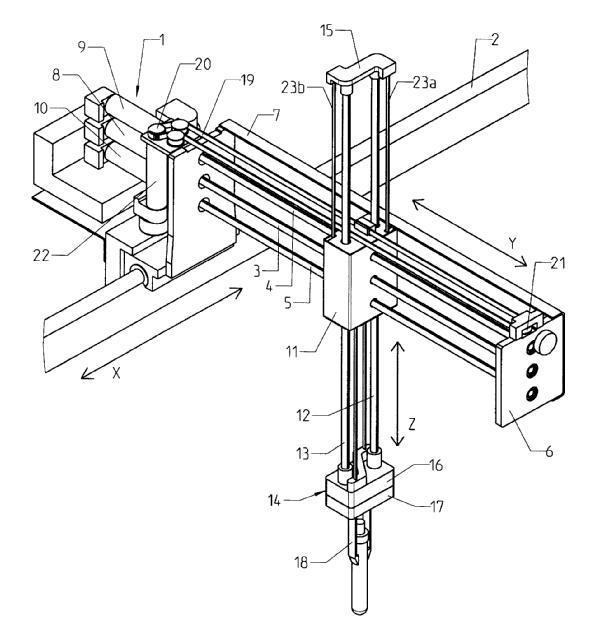
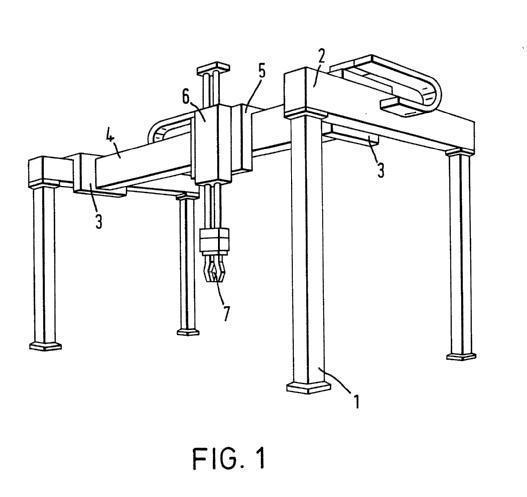
This place covers:
Cartesian coordinate type manipulators having three prismatic joints, wherein one joint is formed by a carriage running on an overhead horizontal beam supported at its two ends by other beams.
Illustrative example of subject matter classified in this group:
Examples of places where the subject matter of this place is covered when specially adapted, used for a particular purpose, or incorporated in a larger system:
Manipulators travelling along a guideway, wherein the guideway is also moved (details concerning the guideways/rails should also be classified here) |
Attention is drawn to the following places, which may be of interest for search:
Portals |
In patent documents, the following words/expressions are often used as synonyms:
- (FR)"robot portique", and (DE)"portalroboter "
This place covers:
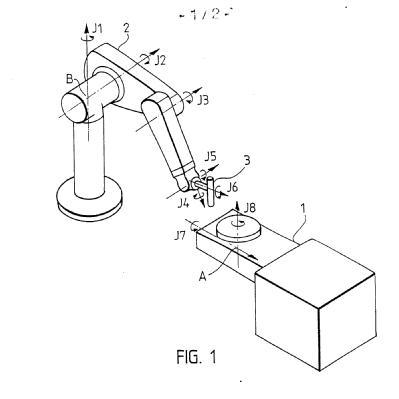
Manipulators having a kinematic chain (excluding the kinematic pairs of the head itself) including at least one revolute joint.
This place covers:
Manipulators having a kinematic chain including at least a revolute joint and arranged so that the working envelope of the manipulator is a cylinder. The kinematic chain usually includes a revolute joint having a vertical axis and two prismatic joints having respectively a vertical and a horizontal axis.
Illustrative example of subject matter classified in this group:
This place covers:
Cylindrical coordinate type manipulators having at least two subsequent revolute pairs having parallel axes.
This place does not cover:
Transfer devices for transferring semiconductors into an out of processing chambers | |
Apparatus specially adapted for handling semiconductor, the wafer being placed on a robot blade, or gripped for conveyance |
In patent documents the following abbreviations are often used:
SCARA | Selective Compliance Assembly Robot Arm |
In patent documents the following expression/word "horizontal articulated manipulator" is often used.
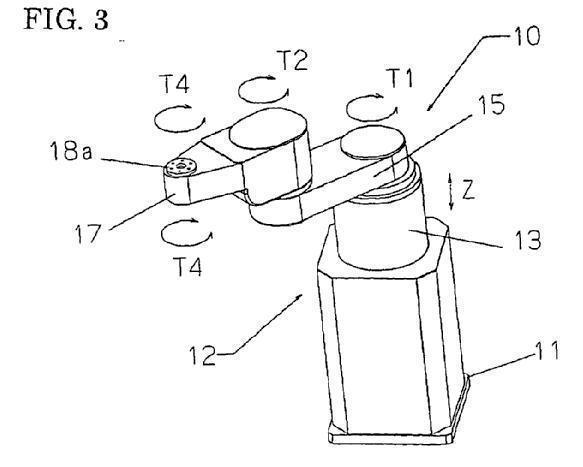
This place covers:
Manipulators having a kinematic chain comprising two revolute joints and a prismatic joint arranged so that the working envelope of the manipulator is a part of a sphere.
Illustrative example of subject matter classified in this group:
In patent documents the following expression/word "spherical" is often used.
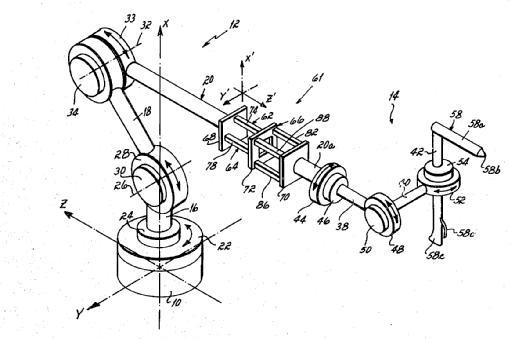
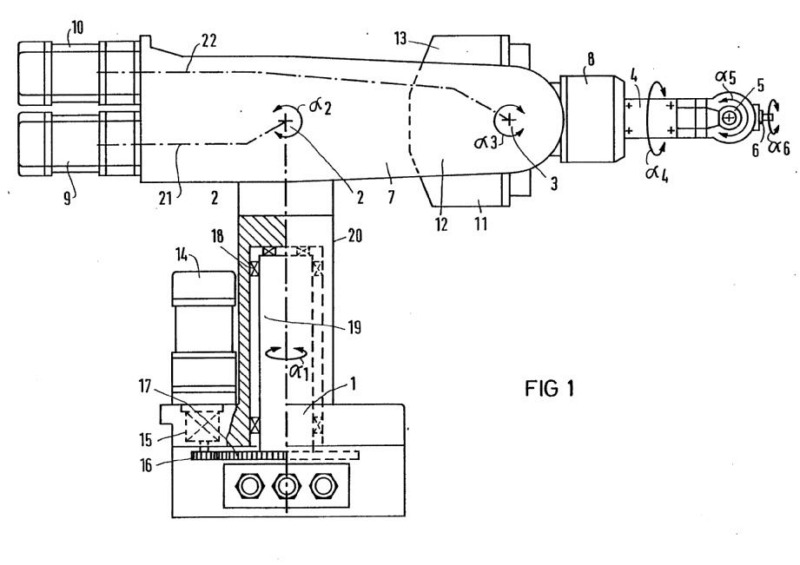
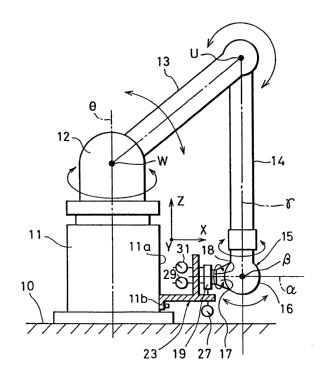
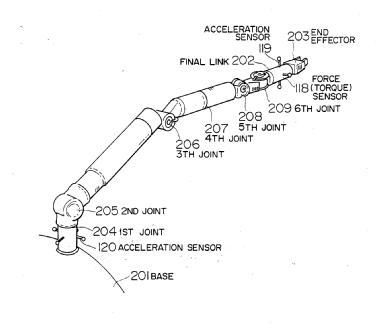
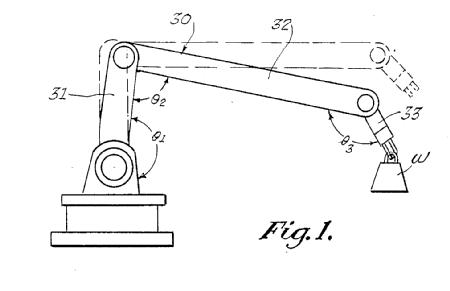
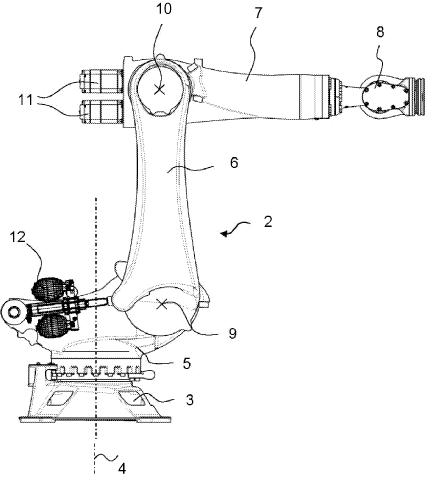
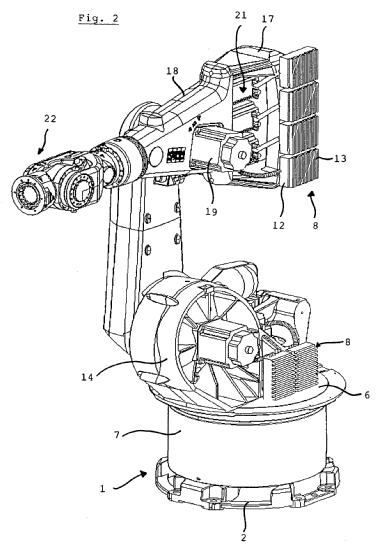
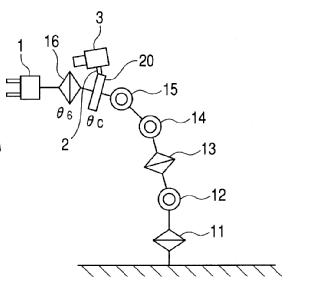
This place covers:
Manipulators having a kinematic chain including at least two subsequent revolute joints having parallel horizontal axis.
The most common revolute coordinate type manipulators have six revolute joints: a first joint having a vertical axis between a basis and a carrousel, a second joint between the carrousel and a lower arm, a third joint between the lower arm and an upper arm, the second and third joint shaving parallel horizontal axis and three further joints for the wrist.
Illustrative example of subject matter classified in this group:
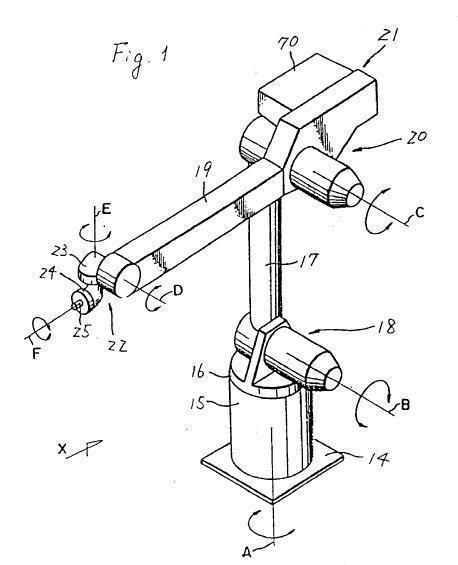
In this place, the following terms or expressions are used with the meaning indicated:
Anthropomorphic | Designates manipulators having a kinematic chain similar to a human arm, i.e. two revolute joints for the shoulder, two revolute joints for the elbow and three revolute joints for the wrist. |
In patent documents, the following words/expressions are often used as synonyms:
- "articulated type", and "jointed type"
This place covers:
Revolute coordinate type manipulators having the axis of the second revolute joint between the carrousel and the lower arm being offset from the vertical axis of the first revolute joint between the basis and the carrousel.
Illustrative example of subject matter classified in this group:
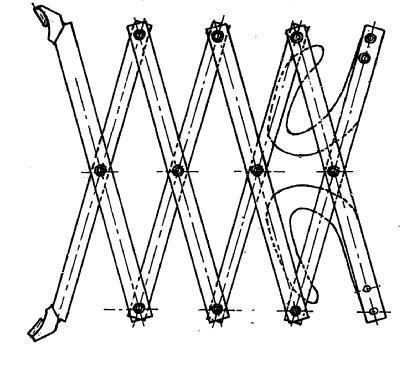
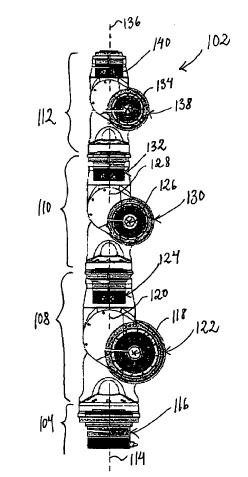
This place covers:
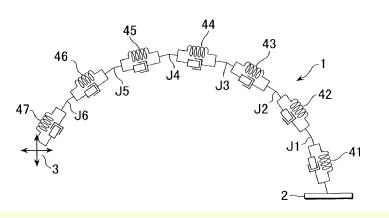
Manipulator arms having multiple articulations placed in series.
Illustrative example of subject matter classified in this group:
Documents should additionally be classified in B25J 18/06 when the number of articulations is very high and the articulations very closed to each other, because the robot arm can be considered as flexible.
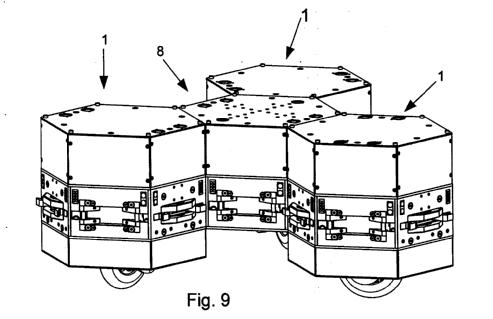
This place covers:
Manipulators which can be easily and quickly mounted / dismounted so that their components can be arranged in different possible configurations.
EP0441397
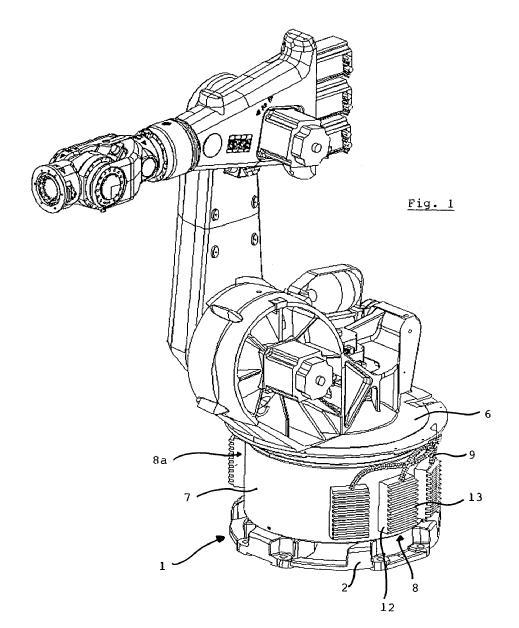
This place covers:
Constructional elements allowing the manipulators to perform their movement.
This place covers:
Constructional elements allowing to adjust the movement of the manipulators.
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Means for preventing, limiting or returning the movements of parts of a control mechanism |
In this place, the following terms or expressions are used with the meaning indicated:
Limit stop | A mechanical device for stopping the travel of a manipulator part along or around an axis. |
Limit switch | An electromechanical device operated by the motion of a part of the manipulator to make or break an electrical connection. |
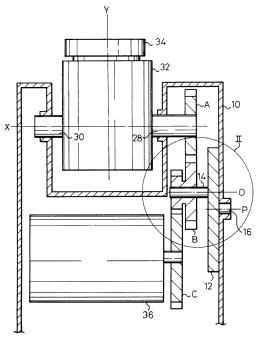
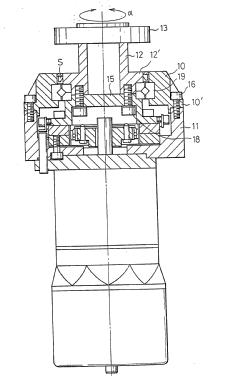
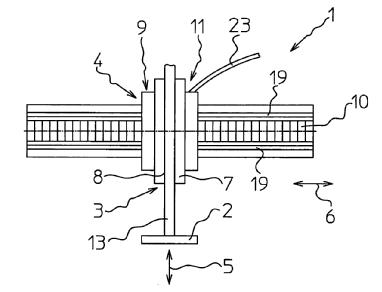
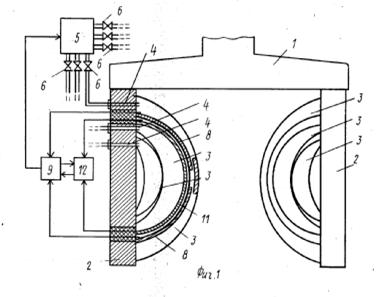
This place covers:
Rotating elements for transmitting a torque specially adapted for manipulators.
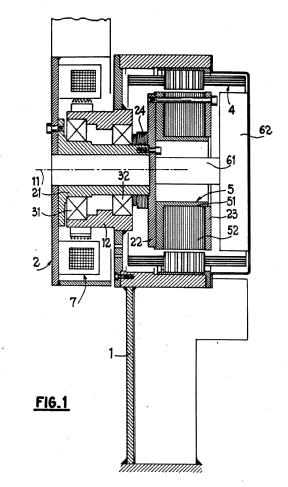
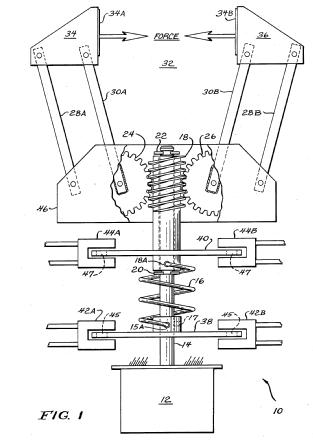
This place covers:
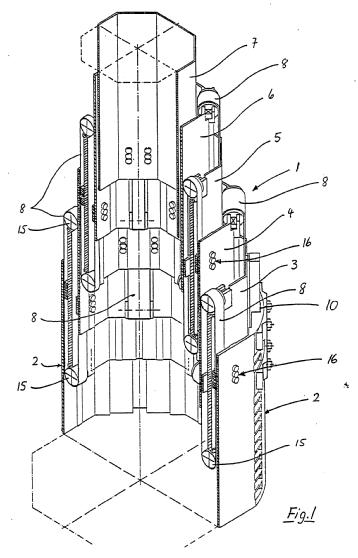
Illustrative example of subject matter classified in this group:
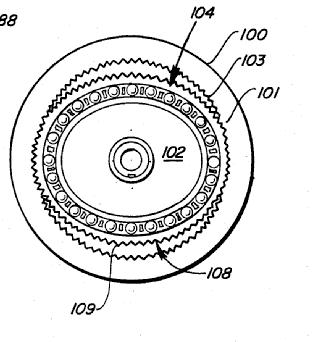
Harmonic drives consist of three basic parts:
- the circular spline which is a rigid ring with internal teeth, engaging the teeth of the flexspine across the major axis of the wave generator;
- the flexspine which is a non-rigid, thin cylindrical cup with external teeth on a slightly smaller pitch diameter than the circular spline; it fits over and is held in an elliptical shape by the wave generator; and
- the wave generator which is a thin, raced ball bearing fitted onto an elliptical plug serving as a high efficiency torque converter.
The advantages include: no backlash, compactness and light weight, high gear ratios and high torque capability.
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Special devices for taking up backlash in toothed wheels | |
Arrangements for adjusting or for taking-up backlash not provided for elsewhere |
In this place, the following terms or expressions are used with the meaning indicated:
Backlash | Amount of clearance between mated gear teeth. |
In patent documents the following expression/word "play" is often used.
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Gearings for conveying or interconverting oscillating or reciprocating motions comprising a rack | |
Racks |
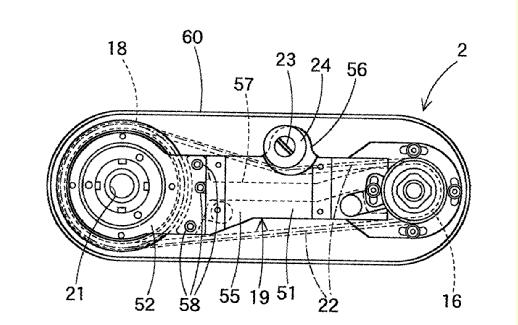
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Gearings for conveying rotary motion by endless flexible members |
This place covers:
Illustrative example of subject matter classified in this group:
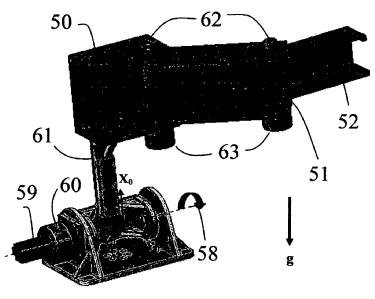
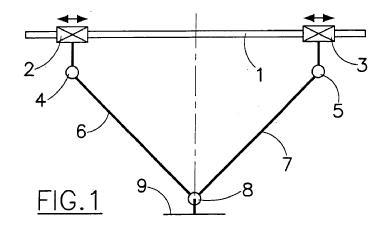
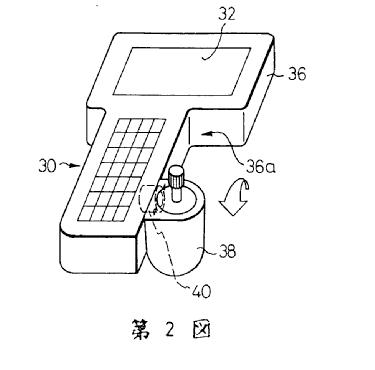
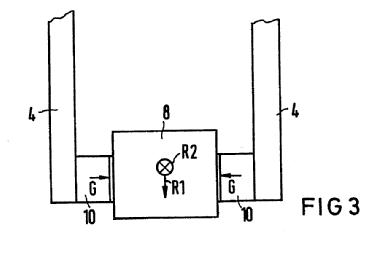
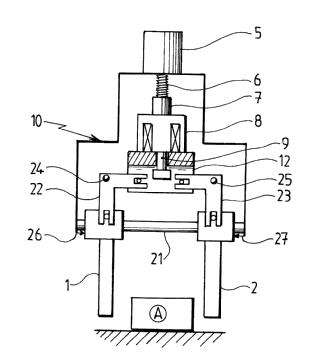
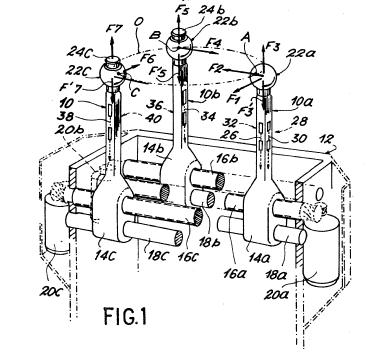
This place covers:
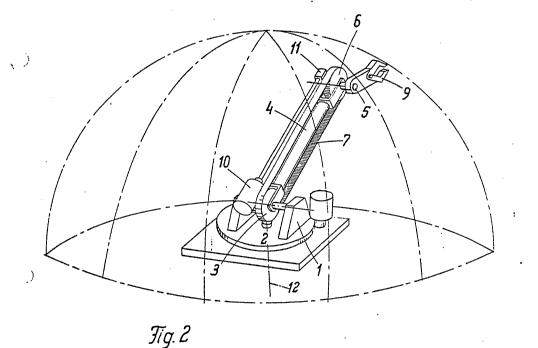
Manipulators having at least one part set in motion by the sole force of gravity acting on this part.
Illustrative example of subject matter classified in B25J 9/1055
US 2008028880
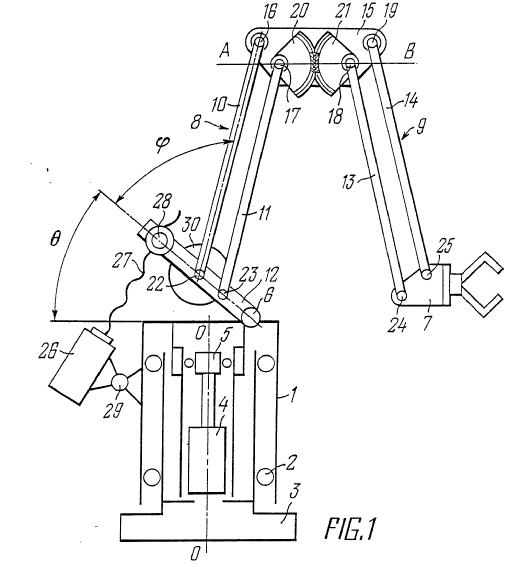
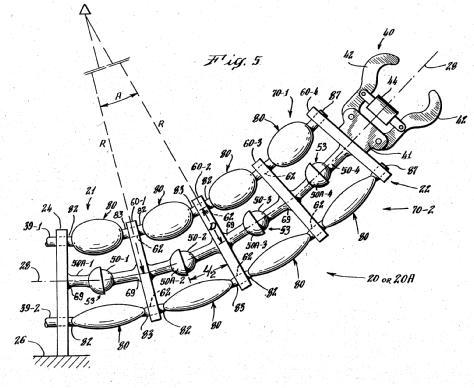
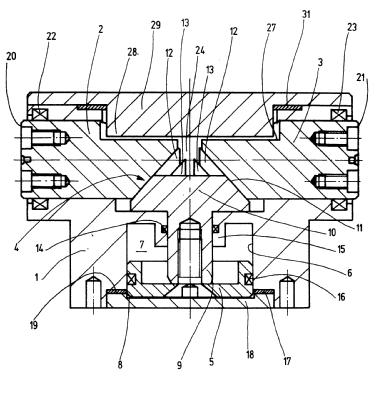
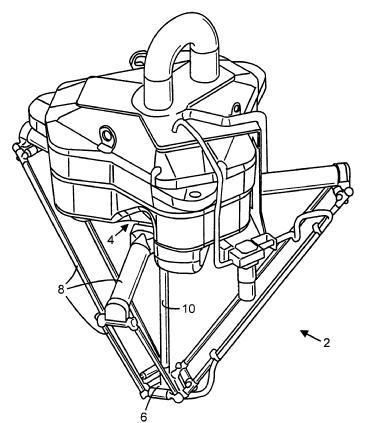
This place covers:
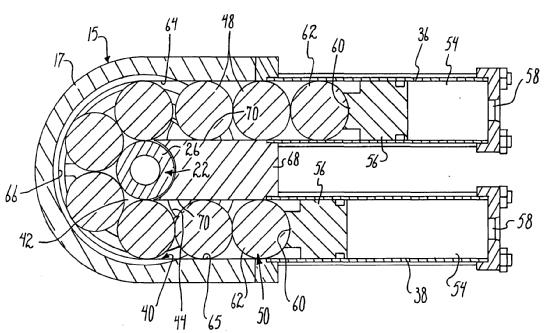
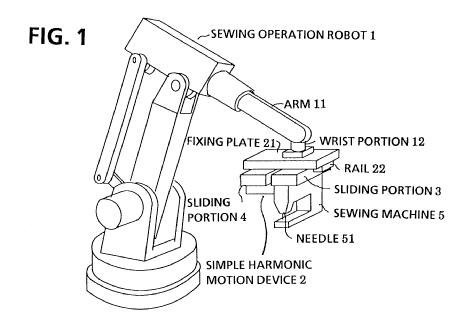
Manipulators having rods or bar for transmitting the motion from an actuator to the working head.
WO 02085580
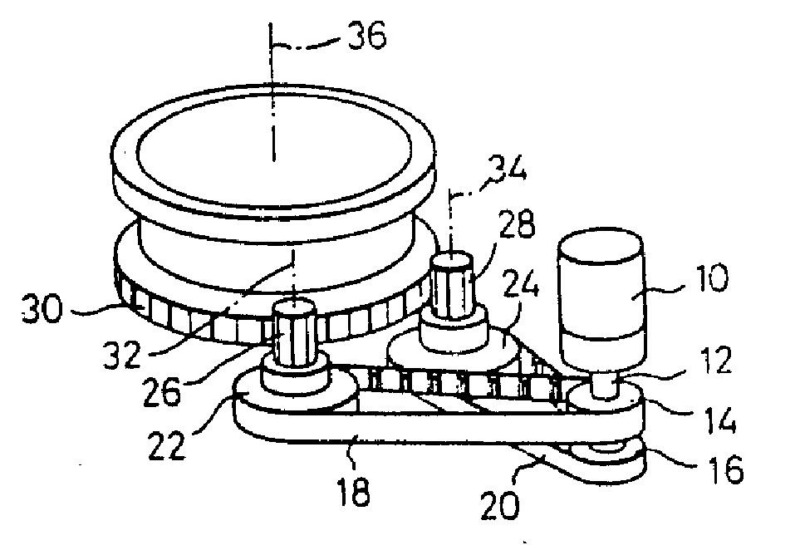
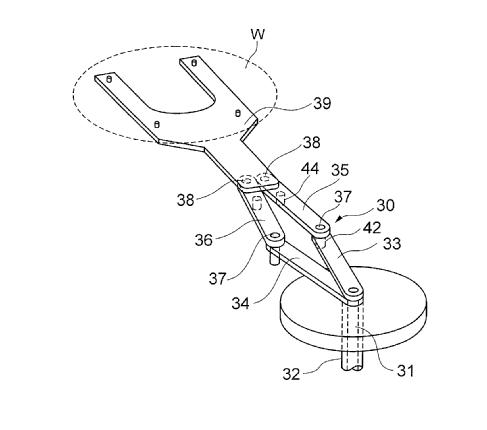
This place covers:
Illustrative example of subject matter classified in this group:
A single parallelogram is sufficient for classification in this group.
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Apparatus for conveying wafers into and out of processing chamber via a lock | |
Apparatus specially adapted for handling semiconductor, the wafers being placed on a robot blade, or gripped by a gripper for conveyance |
This place covers:
Illustrative example of subject matter classified in this group:
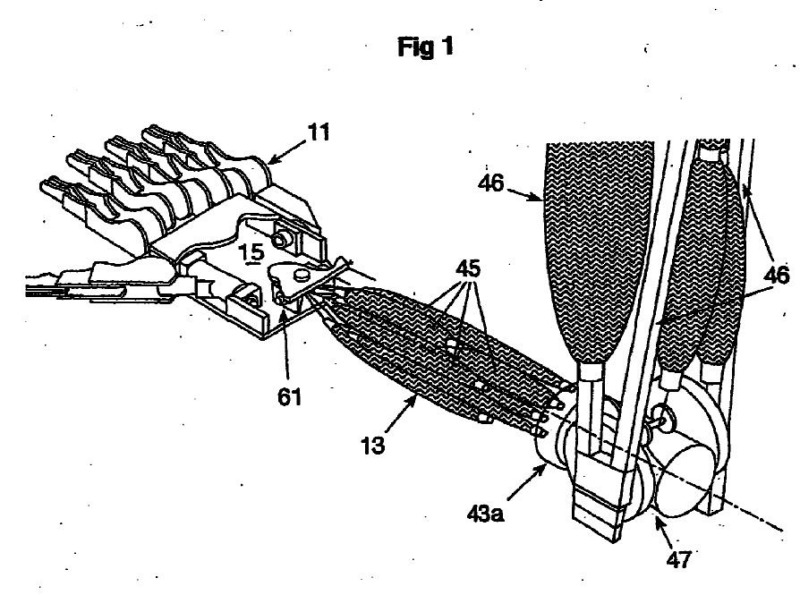
Attention is drawn to the following places, which may be of interest for search:
Fluid-actuated devices for displacing a member, the motor being of the muscle type |
Fluid activated muscles should additionally be classified in B25J 9/142.
In this place, the following terms or expressions are used with the meaning indicated:
Artificial muscle | Generic term used for materials or devices that can reversibly contract, expand, or rotate within one component due to an external stimulus (such as voltage, current, pressure or temperature). Conventional motors and pneumatic linear or rotary actuators do not qualify as artificial muscles because there is more than one component involved in the actuation. |
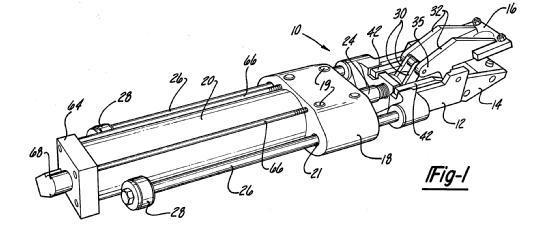
This place covers:
Illustrative example of subject matter classified in this group:
This place covers:
Illustrative example of subject matter classified in this group:
In this place, the following terms or expressions are used with the meaning indicated:
Mechanical programming means | Mechanical parts having a specific shape which create a periodic movement so that the manipulator can execute a predetermined sequence of operations in a synchronized way. |
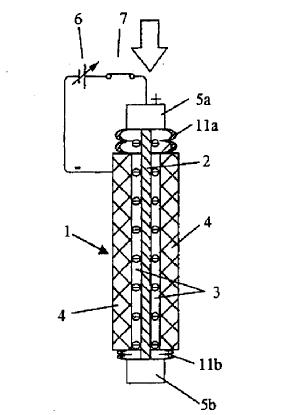
This place covers:
Manipulators provided with an actuator directly powered by a chemical reaction or comprising a chemically synthesized material (e.g. a polymer) able to produce mechanical energy when stimulated (e.g. by an electric current).
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Electro-chemical actuators |
In patent documents the following expression/word "polymer actuator" is often used.
This place covers:
Electric actuators specially adapted for manipulators.
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Linear motors |
A manipulator having only one electric linear actuator would also be classified in this subgroup.
This place covers:
Illustrative example of subject matter classified in this group:
This place covers:
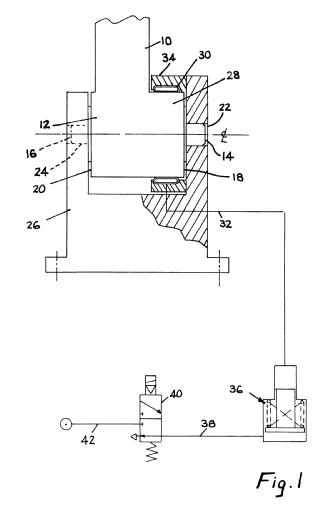
Pneumatic or hydraulic actuators specially adapted for manipulators.
Attention is drawn to the following places, which may be of interest for search:
Fluid-actuated motor of the muscle type |
McKibben actuators should additionally be classified in B25J 9/1075.
In patent documents, the following words/expressions are often used as synonyms:
- "fluidic muscle", "rubbertuator" and "McKibben actuator"
This place covers:
All the topics linked to the control of manipulators.
This place does not cover:
Total factory control, i.e. centrally controlling a plurality of machines, e.g. direct or distributed numerical control [DNC], flexible manufacturing systems [FMS], integrated manufacturing systems [IMS] or computer integrated manufacturing [CIM] |
Attention is drawn to the following places, which may be of interest for search:
Recording and playback systems, i.e. in which the programme is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine |
This place covers:
Specific types of control systems.
Attention is drawn to the following places, which may be of interest for search:
Computer systems based on biological models | |
Artificial life based on physical entities controlled by simulated intelligence so as to replicate life forms, e.g. robots replicating pets of humans in their appearance or behaviour | |
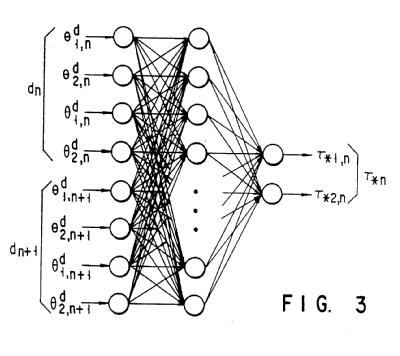
Using neural network models |
This place covers:
Control systems dedicated to specific types of manipulators.
Parallel manipulators as such should additionally be classified in B25J 9/106, B25J 17/0216 or B25J 17/0266.
In this place, the following terms or expressions are used with the meaning indicated:
Parallel manipulator | A mechanical system that uses several computer-controlled serial chains to support a single platform, or end-effector. |
This place covers:
Specific types of control loops.
This place covers:
Systems which emulate the decision making ability of a human expert.
An expert system is divided into two sub-systems: the inference engine and the knowledge base. The knowledge base represents facts and rules or models. The inference engine applies the rules or models to the known facts to deduce new facts.
In a rule based expert system, the knowledge base is represented by an IF-THEN structure, that relates given information of fact in the IF part (so called antecedent, premise or condition) to some action in the THEN part (so called conclusion, consequence or action).
In a model based expert system, the knowledge base is represented by the design and function of the object to be controlled.
Illustrative example of subject matter classified in B25J 9/163
US 2011208356
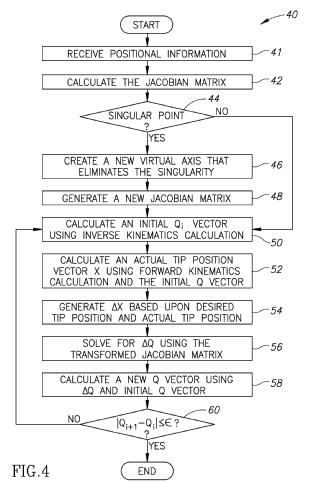
In this place, the following terms or expressions are used with the meaning indicated:
Redundant control | designates the control of a redundant manipulators, i.e. which have redundant joints (It does not mean that several control systems are used in parallel). |
In patent documents the following expression/word "avoiding singularities" is often used.
This place covers:
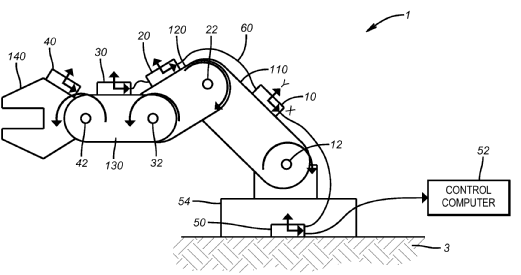
Different types or robot programmes.
This place covers:
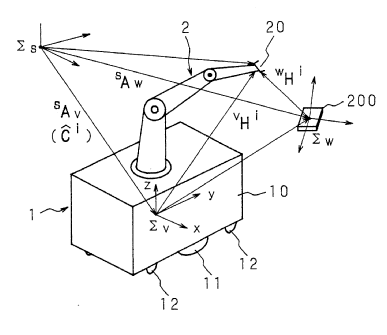
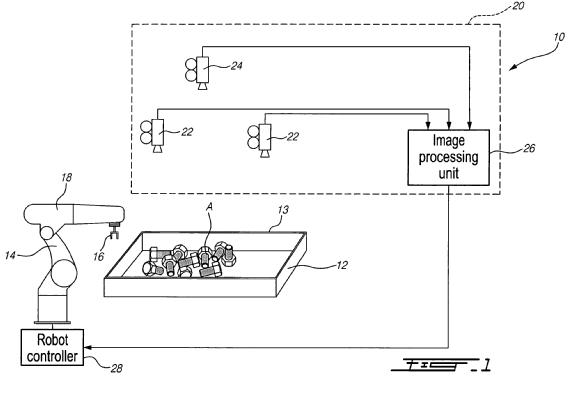
Different control systems dedicated to a specific task of the manipulator.
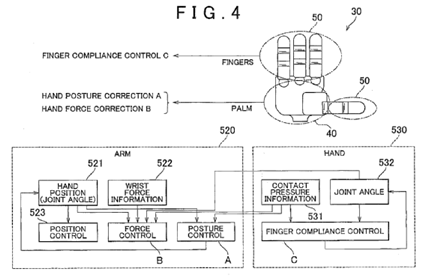
This place covers:
Illustrative example of subject matter classified in this group:
Compliant mechanisms per se should additionally be classified in B25J 17/0208.
Leader-follower systems as such should additionally be classified in B25J 3/00.
Hand-grip control means as such should additionally be classified in B25J 13/02.
Attention is drawn to the following places, which may be of interest for search:
Image feed-back for automatic industrial control, e.g. robot with camera | |
Image analysis |
Details concerning the mounting of the vision system on the manipulator should be classified in B25J 19/021.
This place covers:
Special types of manipulators not covered by the other groups of B25J or manipulators for performing a specific tasks not covered by other subclasses.
This place covers:
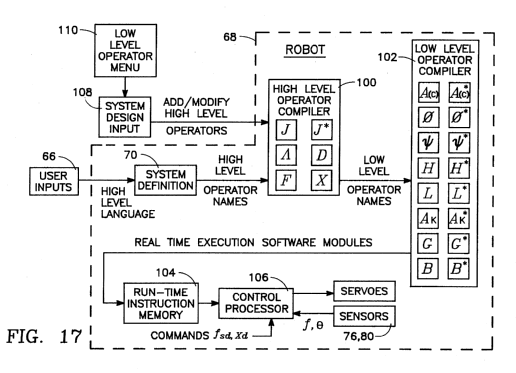
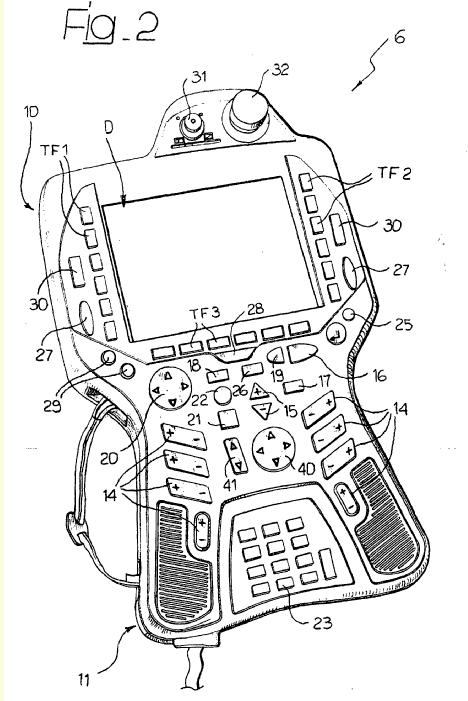
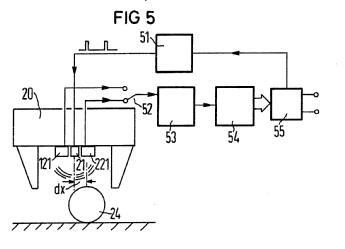
Hardware components involved in the motion control procedure of a manipulator.
This includes input means which allow a user/operator to give instructions to the manipulator (i.e. to control its motions in real-time or to teach such motions).
This also includes all types of sensors which measure a physical quantity of the manipulator (e.g. force or speed) or its environment and convert it into a signal for a motion control system of the manipulator.
This place does not cover:
Program controls for manipulators |
Attention is drawn to the following places, which may be of interest for search:
Control in general |
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Speech recognition |
In patent documents the following expression/word "voice control" is often used.
Attention is drawn to the following places, which may be of interest for search:
Manually-actuated control mechanisms movable by hand about orthogonal axes, e.g. joysticks |
This place covers:
Illustrative example of subject matter classified in this group:
This place covers:
Different types of sensors which can be used in the control systems of manipulators.
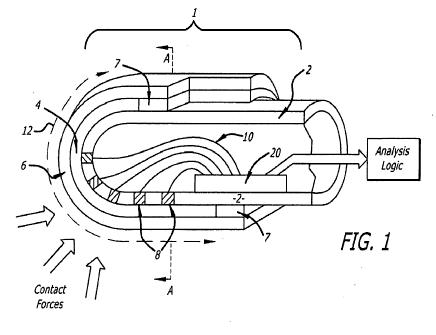
This place covers:
Contact sensors.
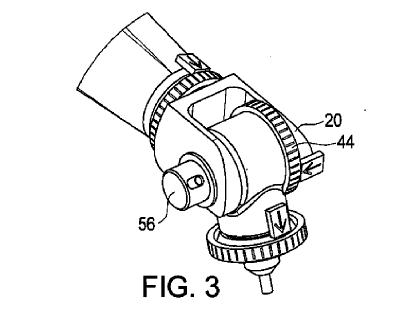
This place covers:
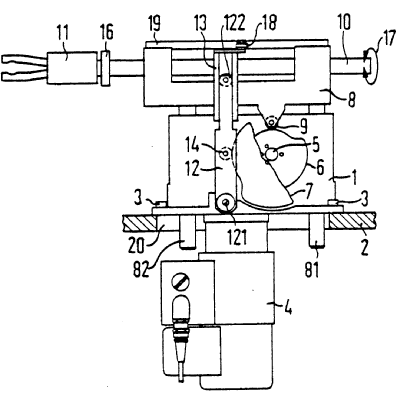
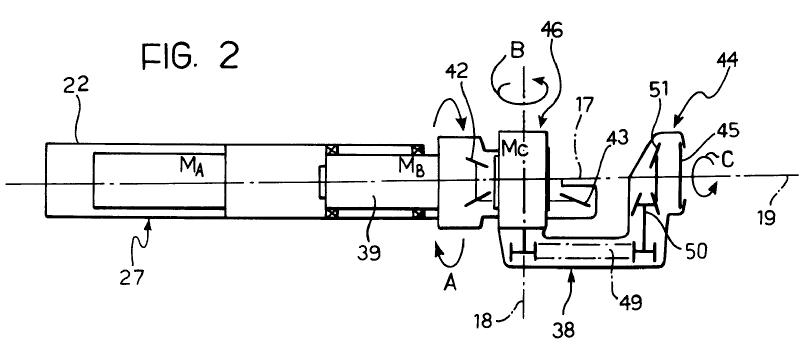
End effectors for manipulators designed to hold an object. It also includes other types of end effectors specially adapted for being mounted on manipulators.
In this subgroup, hand should be understood as head since this subgroup is drawn to reorienting the object with respect to the "hand/head", while the object is gripped in "head/hand".
In this place, the following terms or expressions are used with the meaning indicated:
Adjusting | Modifying the orientation of a work piece while being gripped |
Attention is drawn to the following places, which may be of interest for search:
Hand prostheses |
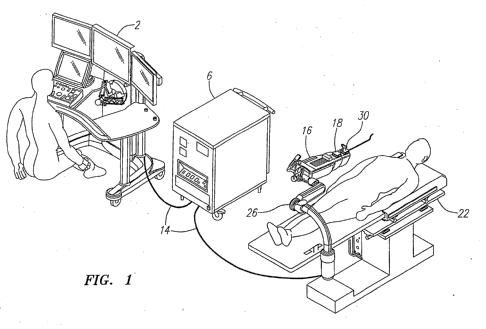
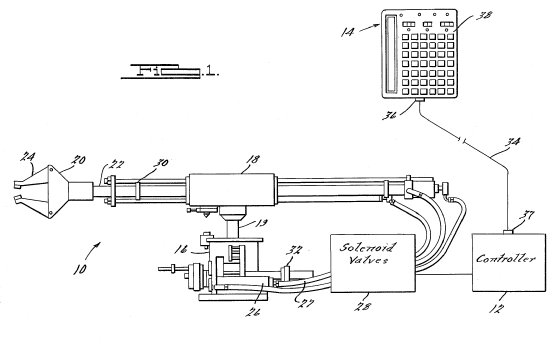
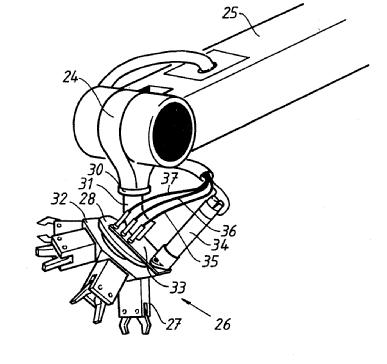
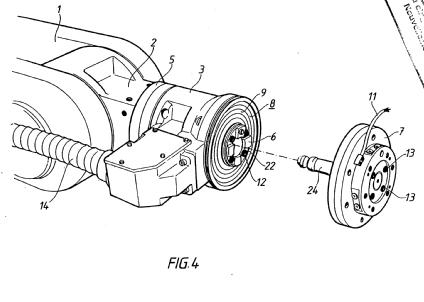
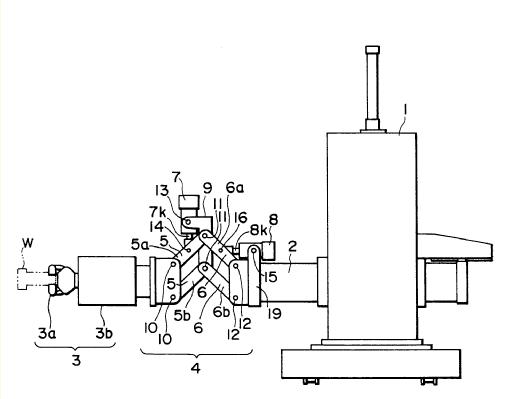
This place covers:
Any end-effector mounted on a manipulator and which is not a gripper.This includes welding tools, machining tools, spraying tools, screwing tools, medical or surgical tools/instruments, etc.
Illustrative example of subject matter classified in B25J 15/0019
EP 0520076
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Devices for picking up and depositing articles or materials with inflatable picking-up means |
This place does not cover:
Grippers with jaw surfaces comprising actuating means for moving the gripped objects |
This place covers:
Grippers having actuators for moving holding elements, sensors and a feedback loop for correcting an error on the position, speed or force of the holding elements.
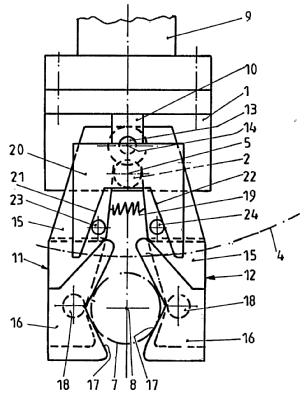
This place covers:
Grippers having pivoting fingers or jaws.
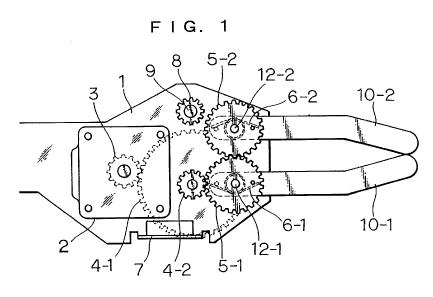
This place covers:
Grippers having fingers or jaws moving in translation.
This place covers:
Illustrative example of subject matter classified in this group:
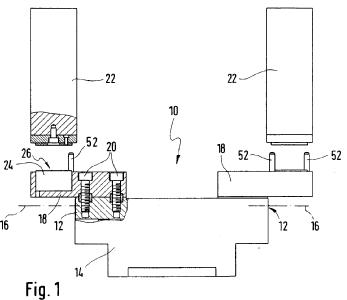
This place covers:
Illustrative example of subject matter classified in this group:
Documents classified in this subgroup also disclose some information concerning the head, the head exchange mechanism or the head exchange process as such.
This place covers:
Grippers holding an object by suction or magnetic force.
A document is classified in B25J 15/06 when it both discloses vacuum holding means and magnetic holding means (in different embodiments or combined in one embodiment).In this case, and provided that the inventive concept is independent of the very nature of the holding means, the document should be classified in B25J 15/06 only and not in the subgroups B25J 15/0608 and B25J 15/0616. If the inventive concept of a document directly concerns the design of vacuum holding means, respectively of magnetic holding means, the document should be classified in B25J 15/0616, respectively in B25J 15/0608.
Attention is drawn to the following places, which may be of interest for search:
Magnetic work holders | |
Devices for picking-up and depositing articles incorporating electrostatic or magnetic grippers | |
Load-engaging elements by magnetic means attached to lifting or lowering gear of cranes |
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Vacuum work holders | |
Devices for picking-up and depositing articles incorporating pneumatic, e.g. suction, grippers | |
Separating articles from piles using suction grippers | |
Load-engaging elements with suction means attached to lifting or lowering gear of cranes | |
Suction cups for attaching purposes |
In patent documents, the following words/expressions are often used as synonyms:
- (EN)"vacuum", "suction", "sucking", (FR)"vide", "dépression", "aspir+", (DE)"saug+", and "vakuum"
- (EN) "cup", "pad", (DE) "napf", and (FR)"ventouse"
This place covers:
Grippers having a plurality of finger members not covered by B25J 15/02.
Attention is drawn to the following places, which may be of interest for search:
Vices having a plurality of parts with linear movement |
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Devices for picking-up and depositing articles with inflatable picking-up means |
Fingers directly actuated by a fluid should additionally be classified in B25J 15/0023.
This place covers:
Devices for linking two parts of a manipulator while allowing a freedom of movement between these two parts.
This place covers:
Joints specially adapted for linking an end effector to the manipulator.
Attention is drawn to the following places, which may be of interest for search:
Machines for connecting objects by press fit | |
Machines for aligning articles to be assembled |
Passive compliant mechanisms avoiding breaking of a robot arm when this robot hurts an obstacle should also additionally classified in B25J 19/063.
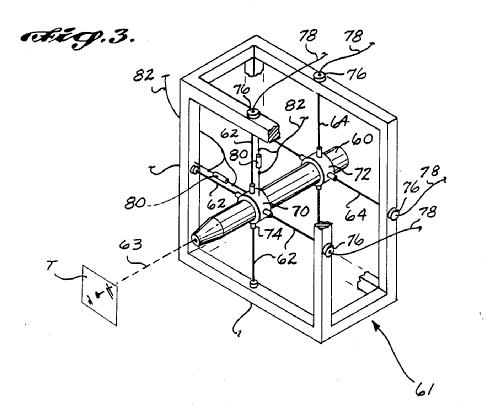
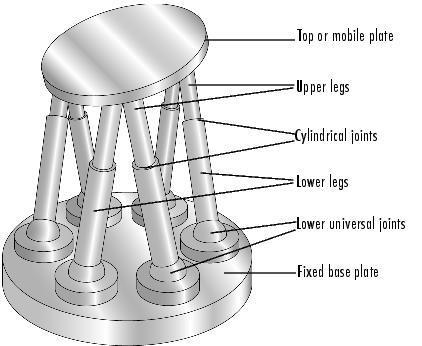
This place covers:
Exclusively parallel kinematics manipulators having 6 linear actuators linked to a base and a moving platform by means of universal or ball joints and allowing 6 degrees of freedom for the platform.
Illustrative example of subject matter classified in this group:
This place does not cover:
2D parallel kinematics manipulators | |
Control of parallel manipulators | |
Other type of 3D parallel kinematics manipulators |
Attention is drawn to the following places, which may be of interest for search:
Machine tools having parallel kinematics | |
Gearings comprising primarily only links or levers, with movements in three dimensions |
In patent documents, the following words/expressions are often used as synonyms:
- "parallel manipulators", "parallel robots" and "parallel kinematics"
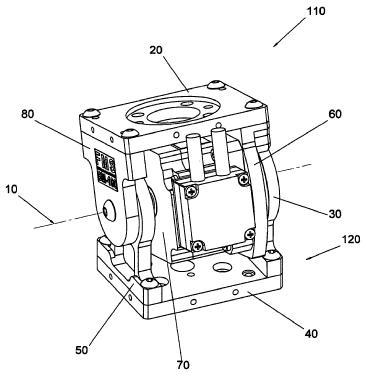
This place covers:
Illustrative example of subject matter classified in B25J 17/0241
DE 202011004164 U
Manipulators having a high numbers of joints mounted in series should additionally be classified in B25J 9/06.
This place covers:
Illustrative example of subject matter classified in this group:
This place does not cover:
2D parallel manipulators (movements in one plane only) | |
Control of parallel manipulators | |
Stewart mechanism (6 linears actuators linked to the base and the platform by universal joints and allowing 6 degrees of freedom for the platform) |
Attention is drawn to the following places, which may be of interest for search:
Machine tools having parallel kinematics | |
Gearings comprising primarily only links or levers, with movements in three dimensions |
In patent documents, the following words/expressions are often used as synonyms:
- "parallel manipulators", "parallel robots" and "parallel kinematics"
Attention is drawn to the following places, which may be of interest for search:
Accessories fitted to machine tools; Weight and flexion compensation |
Control aspects should additionally be classified in B25J 9/1638.
In patent documents the following expression/word "spherical robot" is often used.
This place covers:
This group covers manipulator arms having a variable length.
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Telescopic jib-cranes |
SCARA robots should additionally be classified in B25J 9/042.
This place covers:
Illustrative example of subject matter classified in this group:
Manipulator arms being flexible by means of a large number of articulations must additionally be classified in B25J 9/06.
This place covers:
This group covers all accessories for manipulators, i.e. components of manipulators not directly intended for structure, actuation or control functions.
This place covers:
Illustrative example of subject matter classified in this group:
This place covers:
Accessories allowing to partially compensate the load applied on the manipulator.
This place covers:
Illustrative example of subject matter classified in this group:
This place covers:
Illustrative example of subject matter classified in this group:
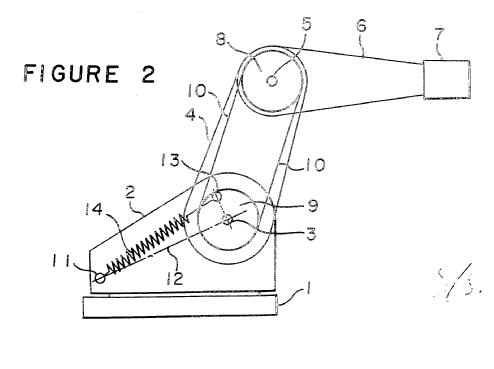
Attention is drawn to the following places, which may be of interest for search:
Springs; shock-absorbers; means for damping vibration |
This place covers:
Illustrative example of subject matter classified in this group:
In patent documents, the following words/expressions are often used as synonyms:
- (DE)"gegengewicht", "ausgleichgewicht" and (FR)"contrepoids"
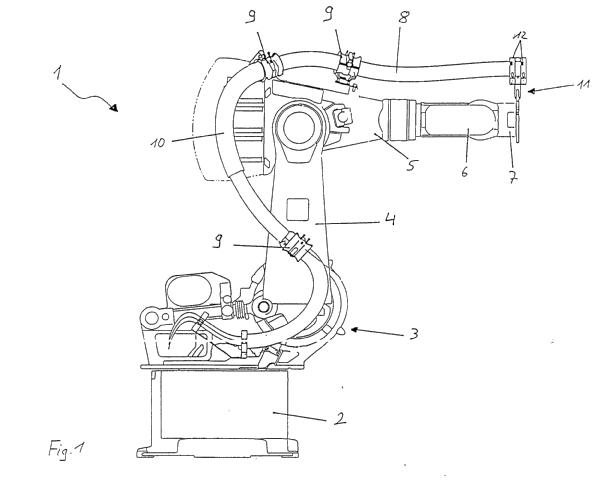
This place covers:
Illustrative example of subject matter classified in this group:
Attention is drawn to the following places, which may be of interest for search:
Arrangements of means for transmitting pneumatic, hydraulic, or electric power to movable parts of a crane | |
Supports for pipes, cables or protective tubing | |
Arrangements of electric cables or lines between relatively-movable parts |
In patent documents, the following words/expressions are often used as synonyms:
- (EN) "cable", "line", "pipe", "hose", "umbilical member", (DE) "energieversorgung", "kabel", "schlauch", (FR) "alimentation en énergie",
This place covers:
Illustrative example of subject matter classified in this group:
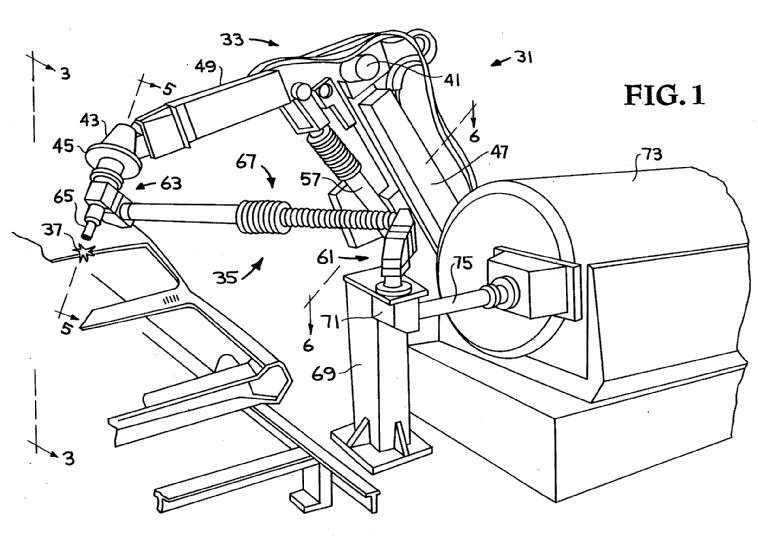
Attention is drawn to the following places, which may be of interest for search:
Robots for moving a laser beam |
This place covers:
Illustrative example of subject matter classified in this group:
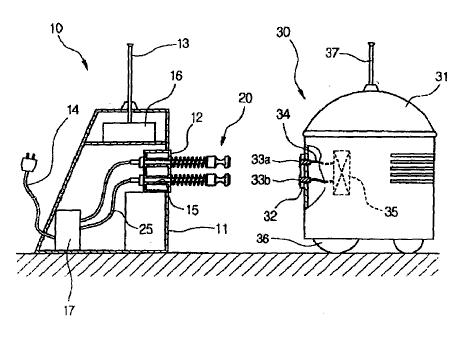
In patent documents, the following words/expressions are often used as synonyms:
- "energy cell", "accumulator" and "power source"
This place covers:
Illustrative example of subject matter classified in this group:
This place does not cover:
Means for preventing dust from entering/escaping manipulators |
This place covers:
Means for avoiding the intrusion of foreign matter, e.g. dust, inside the manipulator or for avoiding the release of harmful matter, e.g. grease particles, from the manipulator into its environment.
Attention is drawn to the following places, which may be of interest for search:
Protective coverings for parts of machine tools |
This place covers:
Illustrative example of subject matter classified in this group:
In patent documents, the following words/expressions are often used as synonyms:
- (EN)"bellow", "(protective) boot", (FR)"soufflet", "manchon (protecteur)" (DE)"schutzbalg" and "faltenbalg"
This place covers:
Illustrative example of subject matter classified in this group:
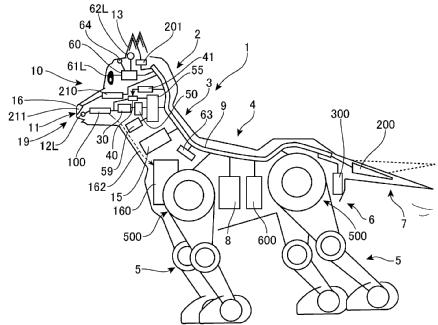
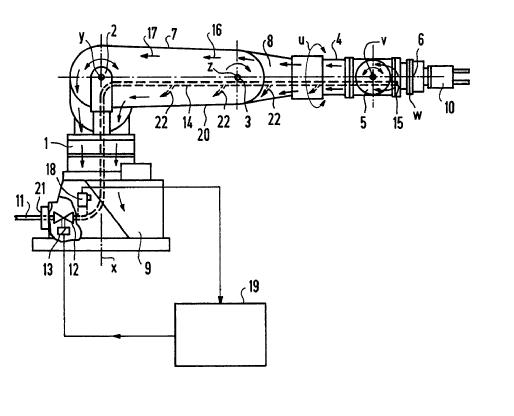
This place covers:
Sensors fitted on manipulators and not directly used in the control systems of the manipulators.
This place does not cover:
Sensors specifically used for controlling manipulators |
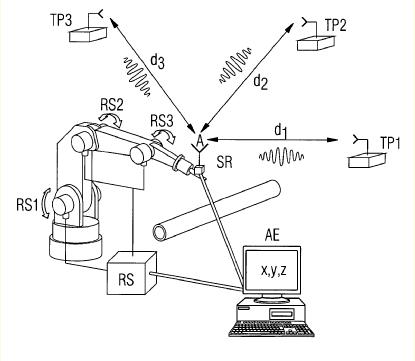
This place covers:
Sensors having optical components.
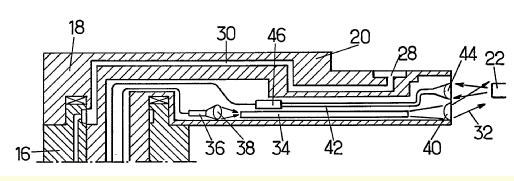
This group includes robots with ultrasonic sensors.
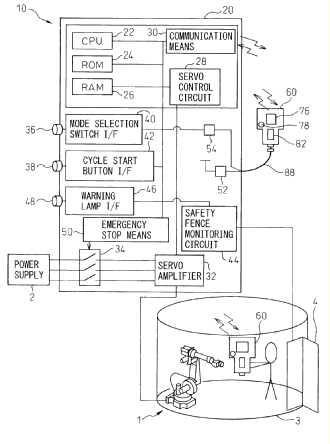
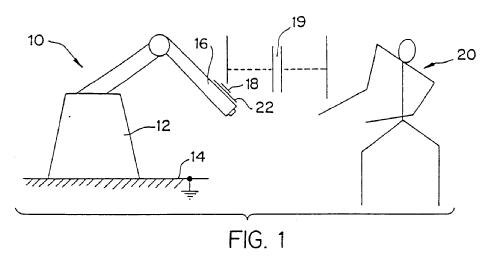
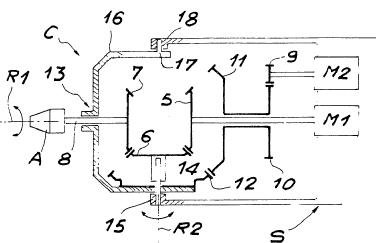
This place covers:
Illustrative example of subject matter classified in this group:
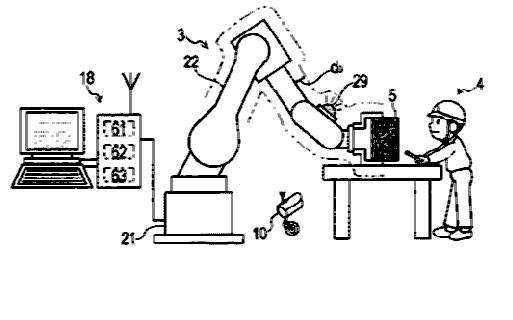
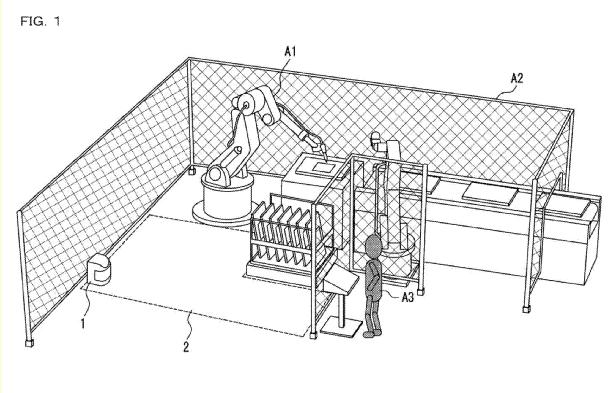
Robot 3 itself, or its vicinity, is equipped with alarm 29 so that it can warn for operator 4 who operates/works with robot 3.
Devices comprising a compliant mechanism should additionally be classified in B25J 17/0208.
Attention is drawn to the following places, which may be of interest for search:
Baby incubators | |
Microbiological incubators | |
Apparatus providing an anaerobic atmosphere |
In patent documents, the following words/expressions are often used as synonyms:
- (EN)"isolator", (FR)"boîte à gants" and (DE)"handschuhkasten"