CPC Definition - Subclass B60W
This place covers:
Control systems for conjoint control of vehicle sub-units of different type or different function.
Control systems specially adapted for hybrid vehicles. Purposes of road vehicle drive control systems for purposes that are
- not related to control of any particular sub-unit, i.e. the controlled sub-unit is not specified, or
- related to conjoint control of vehicle sub-units of different type or different function.
Estimation or calculation of driving parameters for road vehicle drive systems that are used for purposes
- not related to a particular sub-unit, i.e. the controlled sub-unit is not specified, or
- for conjoint control of vehicle sub-units of different type or different function.
Details of control systems for road vehicle drive control, e.g. monitoring of signals for controllers that are used for purposes
- not related to a particular sub-unit, i.e. the controlled sub-unit is not specified, or
- for conjoint control of vehicle sub-units of different type or different function.
Control systems specially adapted for autonomous road vehicles (AV).
Philosophy of conjoint control in subclass B60W: 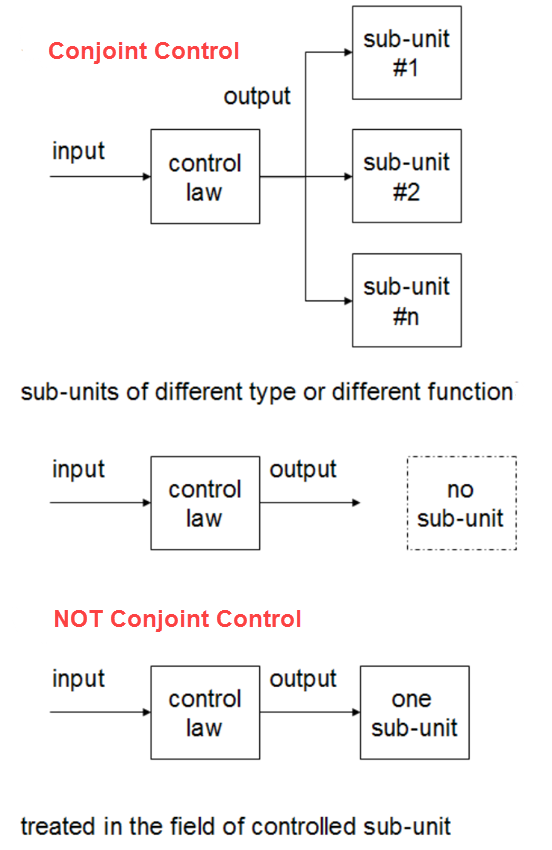
B60W is the application-oriented place covering vehicle drive control systems in general that are not related to a particular sub-unit or used for conjoint control of two or more sub-units. The control of a single particular sub-unit, or same type multiple sub-units for the same purpose are not covered by this subclass and have to be classified in the relevant class for the sub-unit, e.g. F02D or F16H. Where a single particular sub-unit is controlled by signal or commands from other sub-units, the control of this single sub-unit is classified in the relevant place for this sub-unit. For example the control of variable ratio gearing by means of signals from the engine or accelerator is classified in the subclass for gearing F16H.
Conjoint control of driveline units, e.g. engines, and variable-ratio gearing occurring only transiently during ratio shift and being also characterized by the control of the gearing is also classified in the subclass for gearing F16H.
One main group (B60W 20/00) is intended for all control systems specially adapted for hybrid vehicles. This group also covers control systems specially adapted for hybrid vehicles that do not reveal any use of conjoint control. The arrangement or mounting of plural diverse prime-movers for common propulsion of a hybrid vehicle will be classified in the subclass B60K. Conjoint control of pure electric drive units like motor and battery will be classified in subclass B60L. When the architecture or type of transmission of the hybrid vehicle is also of interest, it should be classified in the relevant groups of main group B60K 6/00.
This subclass also cover road vehicle drive control systems not related to any particular sub-unit, i.e. which do not specify which sub-unit is activated or actuated by the control system. For example a control system or control method for predicting a collision which is not related to the control of any specific sub-unit will be correctly covered by the appropriate group B60W 30/08.
This place does not cover:
Propulsion of purely electrically-propelled vehicles with power supplied within the vehicle |
Attention is drawn to the following places, which may be of interest for search:
Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electrical and internal combustion motors | |
Vehicle fittings for automatically controlling vehicle speed by acting on a single sub-unit | |
Electrical circuits for triggering safety arrangements to protect or prevent injuries to occupants or pedestrians | |
Brake control systems for vehicle drive stability | |
Steering control for vehicles, i.e. means for initiating a change of direction of the vehicle | |
Power-assisted or power-driven steering | |
Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits | |
Steering not otherwise provided for | |
Controlling combustion engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto | |
External control of clutches | |
Combinations of clutches and brakes | |
Control functions within change-speed- or reversing-gearings for conveying rotary motion | |
Systems for controlling position, course, altitude, or attitude of land, water, air, or space vehicles | |
Traffic control systems i.e. systems transmitting information to a plurality of vehicles simultaneously in order to co-ordinate the flow of vehicles or systems controlling platoons of vehicles | |
Anti-collision systems |
Whenever one or more specific types of sub-units are controlled, classification in main group B60W 10/00 should be given for each of the different sub-units controlled. For each controlled sub-unit a classification symbol should be added in the relevant place. When documents classified in main group B60W 10/00 are also relevant for main groups B60W 20/00 - B60W 60/00, a classification in one of these groups is required.
Contrary to the IPC, B60W in CPC is a multi-aspect classification system where classifications have to be given for all features of the independent claims and for all features contributing to the operability of the disclosed invention.
The use of the indexing codes is mandatory.
In this place, the following terms or expressions are used with the meaning indicated:
Automatic control | Control system for mechanising or assisting, to a full- or partial extent, tasks associated with driving of the vehicle, e.g. those normally carried out by the driver or those necessary to control the motion of the vehicle. |
Auxiliary equipment | Subsidiary or supplementary device of the propulsion, transmission or other units of the vehicle, e.g. a pump for supply of pressure for the control unit. |
Conjoint Control | Programmed or condition-responsive automatic controller on-board the vehicle, embodying control logic for plural vehicle sub-units and sends control signals to actuators of two or more vehicle sub-units, so that the sub-units act together to solve a particular problem, in order to improve stability, comfort or safety by managing the global dynamics of the vehicle, or in response to a particular driving condition. The control logic considers the plural vehicle sub-units simultaneously, however, the control signals need not be sent at the same time. |
Conjoint control of diverse vehicle sub-units | Control of different sub-units within the same vehicle for those vehicles defined under note to class B60, and of general applicability to different types of vehicles normally under the control of a human driver or autonomous driving system. |
Cruise control | System for automatically controlling vehicle speed, which may include additional functions e.g. control of distance between vehicles, so-called "Adaptive Cruise Control" (ACC). |
Drive control system | Electronic system in a road vehicle for automatically controlling the movement of that vehicle in order to take certain actions. |
Driveline Clutch | Clutch used for purposes other than changing gear ratios. |
Driving parameter | All input or output parameters of the road vehicle drive control systems, e.g. road specific parameters, driver or passenger related parameters, state variables of motion of the vehicle body or parameters related to the vehicle itself like load or weight of the vehicle. |
Hybrid vehicle | Vehicles having two or more prime movers of more than one type, e.g. electrical and internal combustion motors, and that are either singularly or in combination used for propulsion of the vehicle. |
Road Vehicle | Motorised vehicle for transportation on roads, e.g. an automobile, truck or bus. |
Sub-Unit | One of the following vehicle systems: propulsion system, clutch system, change-speed gearing system, system for distributing drive torque between front and rear axles, axle differential system, brake system, steering system, suspension system, energy storage means, fuel cells or auxiliary equipment. |
This place covers:
Sub-units of different type or function, which are controlled by a controller on board of the vehicle. The controller sends control signals to two or more vehicle sub-units, so that the sub-units act together to solve a particular problem in order to improve stability, comfort or safety of the vehicle or to propel the vehicle. For each of the sub-units which are controlled by the controller a classification symbol (invention-type) should be added.
This place does not cover:
Propulsion of purely electrically-propelled vehicles with electric power supplied within the vehicle |
When classifying in group B60W 10/00, classification must also be made in groups B60W 20/00 - B60W 60/00 in order to identify the purpose or use of the control. For each of the sub-units which are controlled by the controller a classification symbol (invention-type) should be added. The sub-units covered by B60W 10/00 have to be sub-units of a vehicle as defined by B60W 20/00 - B60W 60/00.
The use of the indexing codes is mandatory.
This place covers:
Exhaust brake systems provided in addition to the engine.
Attention is drawn to the following places, which may be of interest for search:
Including control of combustion engines |
This place covers:
Control systems exclusively for hybrid vehicles, i.e. vehicles combining at least two different prime movers which convert energy taken from at least two different in vehicle storage devices, e.g. fuel tank and battery, into mechanical energy for the propulsion of the vehicle.
Whenever one or more specific types of sub-units are controlled, classification in main group B60W 10/00 should be given for each of the different sub-units controlled. When the architecture or type of transmission of the hybrid vehicle is of interest, it should be classified in the relevant groups of B60K 6/00.
This place covers:
Conjoint control of the prime movers to meet power demand including also situations in which the power is not demanded for propelling the vehicle, to keep one prime mover in an off-state or an on-state, e.g. engine is kept on for warming up with high battery charge state or engine is kept off even with low battery charge state in a traffic jam.
This place covers:
Control strategies using performance models of prime movers and sub-units, e.g. battery or gearing, are predicted and adjusted to be controlled at their optimal working points; Control is based on internal vehicle information only;
Control strategies to operate the vehicle or one or more sub-units at the point of highest energy efficiency with MPC providing the data for selecting optimal points of operation to meet the required power demand.
This place does not cover:
Control strategies based on data provided by conventional technology, e.g. optimum fuel consumption line | |
Utilising navigation and traffic information in the control strategy |
If the particular effect is fuel economy, no additional classification is necessary. If it is another effect, additional classification in B60W 20/15 is necessary.
In this place, the following terms or expressions are used with the meaning indicated:
MPC | Model Predictive Control; Control relying on one or more models of the drive train or vehicle sub-units, wherein the presently applied control signal is based on an optimal control signal computed over a future period of time. For example, the current status of the vehicle, e.g. vehicle dynamics or weight, torque at drive wheels, the driver input, e.g. accelerator pedal position, steering and the status of various sub-units, e.g. engine speed, motor torque, gear ratio engaged, clutch position or torque, temperature, battery charge state. These data are fed into the models. Based on this information, MPC simulates possible changes to the sub-units, e.g. changing engine speed or gear ratio, switching from series hybrid to parallel hybrid. The models may deliver several results. These results are analysed to determine the most suitable sub-unit status in order to arrive at a particular effect. |
This place covers:
Control systems using path-dependent information, e.g. road slope, curve radius, distance to intersection, traffic information, weather conditions, emission or noise restrictions;
The sub-units are brought into the most suitable status depending on this information, e.g. keeping the engine switched off and propelling the vehicle using only the motor if there is a traffic jam.
This place does not cover:
Estimation or calculation of [non-directly measurable] driving parameters |
This place covers:
Control strategies aiming at maintaining battery state of charge (SOC) within defined limits to extend battery lifetime.
Attention is drawn to the following places, which may be of interest for search:
Control methods based on models predicting performance |
This place covers:
Control systems only usable for hybrid vehicles controlling power contribution of prime movers to keep battery healthy in combination with braking regeneration.
This place does not cover:
Braking regeneration |
Mandatory classification in Braking Regeneration: B60W 30/18127
This place covers:
Control strategies directed to performance or operation of the vehicle in such a way so as to provide a specific benefit, e.g. maintaining lubrication of an engine.
This place covers:
Control strategies lowering the level of emissions leaving the exhaust, i.e. downstream of catalytic converter or particle filter, not the emissions leaving the engine.
This place covers:
Control strategies mitigating vehicle noise, e.g. for driver comfort, quiet running in noise abatement areas.
This place covers:
Control strategies related to extended engine off times, e.g. preventing the fuel from getting old, cylinder purging, lubrication issues.
This place covers:
Control strategies to provide enhanced acceleration, e.g. the electrical motor assists the engine for better acceleration.
This place covers:
Control systems deciding which hybrid configuration is used for vehicles with a drive train architecture which allows for different configurations, e.g. parallel, serial.
This place does not cover:
Architecture of the hybrid electric vehicle |
This place covers:
Control systems deciding selection of transmission gear ratio, e.g. with a limited number of available gear ratios for electric drive mode or with a different number of available gear ratios in electric mode and in internal combustion mode.
This place does not cover:
Control of change speed gearings, together with other vehicle sub-units | |
HEV transmission gearing | |
Gearings and control of gearings |
Attention is drawn to the following places, which may be of interest for search:
Improvement of gear change, e.g. by synchronisation or smoothing gear shift |
Control systems deciding selection of gear ratio and prime mover power distribution should receive classification B60W 20/10.
In patent documents, the following words/expressions are often used as synonyms:
- transmission", "gearbox" and "gearing"
This place covers:
Control systems for enabling smooth transition between motor and engine propulsion, e.g. during hill hold, during synchronisation processes, during transition between electrical and combined drive mode.
This place does not cover:
Power-up or power down of the driveline |
This place covers:
Control strategies evaluating or monitoring of an operational condition of the vehicle to identify any potential failure, or operation of the vehicle with minimum or no harm to the vehicle in the event of failure, e.g. driving the vehicle to a reasonable distance without necessarily damaging the engine, electrical drive mode when fuel tank is empty.
This place covers:
Advanced Driver Assistance Systems for ensuring comfort, stability and safety or purposes of road vehicle drive control systems for propelling or retarding the vehicle
Control of a single sub-unit or of sub-units of the same type or function is classified in the relevant place for the sub-unit.
This place covers:
- Control of vehicle driving stability when claimed in general and not related to a specific sub-unit.
- Control of vehicle driving stability using conjoint control of more than one sub-unit, e.g. propulsion unit, brake system and steering.
This place does not cover:
Exclusive brake control systems for vehicle drive stability |
Attention is drawn to the following places, which may be of interest for search:
Suspension control characterised by the regulation being combined with other vehicle control systems |
This place covers:
Systems influencing the drivability or agility of a vehicle in a curve
Attention is drawn to the following places, which may be of interest for search:
Arrangements for automatically controlling steering depending on driving conditions sensed and responded to |
Attention is drawn to the following places, which may be of interest for search:
Steering aids | |
Parking performed automatically |
This place covers:
Control systems for predicting coming or possible collisions or taking measures to prevent or weaken the impact of a collision.
This place does not cover:
Electrical circuits for triggering safety arrangements to protect or prevent injuries to occupants or pedestrians | |
Means for detecting collisions, impeding collision or roll-over |
Attention is drawn to the following places, which may be of interest for search:
Anti-collision systems for land vehicles |
This place covers:
Control systems for adapting vehicle speed to particular conditions, e.g. for controlling distance to preceding vehicle or taking actions when preceding vehicles is going to stop.
Attention is drawn to the following places, which may be of interest for search:
Vehicle fittings for automatically controlling vehicle speed by acting on a single sub-unit | |
Traffic control systems i.e. systems transmitting information to a plurality of vehicles simultaneously in order to co-ordinate the flow of vehicles or systems controlling platoons of vehicles |
This place covers:
Adaptive cruise control systems controlling the speed such that a limit is placed either at an upper threshold or a lower threshold.
This place covers:
Adaptive cruise control systems controlling distance between vehicles by controlling the speed such that a limit is placed either at an upper threshold or a lower threshold.
This place covers:
Control systems for the driving or retarding of road vehicles controlling multiple sub-units
Attention is drawn to the following places, which may be of interest for search:
Control systems specially adapted for hybrid vehicles | |
Controlling combustion engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto | |
Control functions within change-speed- or reversing-gearings for conveying rotary motion |
This place covers:
The estimation or calculation of non-direct measurable parameters related to vehicle drive control and not used for a particular sub-unit, e.g. by using mathematic models for estimation of the parameters.
This place covers:
- Process diagnostic or vehicle driver interfaces,
- Failure detection models,
- Failure correction strategy,
- Monitoring means for the function of the control systems,
- Interaction between the driver and the control system.
This group does not cover detection of failures of or in single sub-units. Such detection is classified in the relevant place for the sub-unit.
In this place, the following terms or expressions are used with the meaning indicated:
Interaction between the driver and the control system | Communications or actions with a feedback loop between the driver and the control system |
Attention is drawn to the following places, which may be of interest for search:
Input arrangements of instruments specially adapted for vehicles |
This place covers:
On board failure detection
Failure correction strategies
Means or methods to repair failures
Work around methods in case of failure
Control input devices for limp home
This place covers:
Control methods for fail safe which will avoid situations where a defect part is involved, i.e. the control uses different parts or a method for a work around. No redundant parts are used and these methods could lead to constrains in functionality.
This place covers:
Control methods for fail safe which will put the control in a predefined state, e.g. the transmission in particular gear ratio, or for giving priority to a particular actuator.
This place covers:
Interfaces between driver and control system not for a single or particular sub-unit with interaction, e.g. communications or actions with a feedback loop between the driver and the control system. The interaction can be a tactile feedback to the driver, e.g. vibrations of the steering wheel.
This place covers:
- Interpreting driver intention and initiating control based on different parameters, e.g. vehicle speed and driver activity
- By monitoring actuating speed of the accelerator
This place covers:
Preventing particular driving manoeuvres based on the vehicle situation, e.g.
limiting driver control by drive assistance systems in critical driving situations
This place covers:
- Warning or informing the driver when the movement of the vehicle will be changed momentarily, e.g. adding a slight yaw rate, momentary deceleration
- Informing the driver that the drive control mode will change, e.g. from comfort mode to performance mode
- Assistance systems for warning the driver, e.g. warning the driver if approaching speed at a stopping location will be too high
This place covers:
- On-board control systems for autonomous road vehicles operating on a road network, whereby the control systems perform decision making processes in real-time about all dynamic driving tasks necessary to control the position of the vehicle along the road network, based on factors related to the vehicle itself, its occupants or its environment, and actuate the required vehicle subsystems to execute the dynamic driving tasks. An example of a decision making process is to adjust the immediate trajectory of the autonomous vehicle based on the environmental conditions in a close surrounding of the vehicle, while traveling along a given route provided by a navigation system. Although the ultimate driving decision remains on board, the AV may outsource part of its computation tasks (e.g. for managing computation load, updating machine learning models).
- Control systems for hand-over processes to and from vehicle occupants specially adapted therefor.
This group covers on-board control systems, whereas subclass G05D covers remote control systems.
This group also covers control systems for autonomous vehicles in an open road environment.
Traffic control systems are covered by G08G.
Attention is drawn to the following places, which may be of interest for search:
Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles | |
Route guidance in navigation systems | |
Radio direction-finding; Radio navigation; Determining distance or velocity by use of radio waves; Locating or presence-detecting by use of the reflection or reradiation of radio waves; Analogous arrangements using other waves | |
Systems controlling the positions of autonomous vehicles driving in a coordinated manner, e.g. in convoys or fleets | |
Control of position or course in two dimensions | |
Electric digital data processing | |
Pattern recognition | |
Computer systems based on specific computational models | |
Image data processing or generation, in general | |
Traffic control systems for road vehicles |
When classifying in group B60W 60/00, multi-aspect classification must also be applied in groups B60W 10/00 – B60W 50/00, whenever appropriate.
The use of the indexing codes of this subclass is mandatory.
In this place, the following terms or expressions are used with the meaning indicated:
Route | series of road segments in a road network, between a starting point and a destination |
Trajectory | path travelled over ground |
This place covers:
The planning or execution of the following dynamic driving tasks:
- Acceleration or deceleration
- Braking
- Steering
This place covers:
Planning and execution of driving tasks adapted to the comfort of the occupants, e.g. by limiting acceleration, centrifugal or centripetal forces or jerk.
This place covers:
Planning and execution of driving tasks prioritizing safety, e.g. increased spacing, reduced speed.
Attention is drawn to the following places, which may be of interest for search:
Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences |
This place covers:
Limitation of autonomous vehicle operations in response to vehicle systems failure, extreme weather conditions or infrastructure conditions.
This place covers:
The operation of the autonomous vehicle is adapted or restricted in response to a detected security violation.
Attention is drawn to the following places, which may be of interest for search:
Means for preventing jamming or interference of a remote switch control signal | |
Wireless connected vehicles in generals | |
Security arrangements, e.g. access security or fraud detection; Authentication, e.g. verifying user identity or authorisation | |
Fraud detection or prevention Detection of security violation |
Attention is drawn to the following places, which may be of interest for search:
Dispatching vehicles on the basis of a location, e.g. taxi dispatching |
This place covers:
The "taxi operations" include the carriage of passengers for reward, e.g. buses. Taxi operations also include "ridesharing".
Attention is drawn to the following places, which may be of interest for search:
Rendez-vous, i.e. searching a destination where several users can meet, and the routes to this destination for these users; Ride sharing, i.e. searching a route such that at least two users can share a vehicle for at least part of the route |
Attention is drawn to the following places, which may be of interest for search:
Target tracking using radar, ultrasonic or lidar systems | |
Radar, ultrasonic or lidar systems specially adapted for anti-collision purposes | |
Analysis of motion per image analysis per se | |
Analysis of motion per image analysis, with motion prediction involving stochastic approaches, e.g. Kalman filters | |
Depth or shape recovery from motion | |
Determining a region of interest in an image for recognising patterns in scene | |
Extraction of features in an image for object recognition | |
Recognising patterns in scenes exterior to a vehicle, e.g. recognising other vehicles, pedestrians, traffic signs, parking places |
This place covers:
Decision making processes used to initiate or abort handover of control of the driving tasks between the on-board control system and an occupant, e.g. ascertaining occupant or control system ability to perform driving tasks, determining time or distance required to perform handover.
Processes performed during handover of control of the driving tasks between the on-board control system and an occupant, e.g. processes for gradually transferring the driving tasks from the on-board control system to an occupant.
This place does not cover:
Handing over between remote control and on-board control; Handing over between remote control arrangements |
Attention is drawn to the following places, which may be of interest for search:
Interaction between the driver and the control system | |
Selecting or switching between different modes of propelling |
When classifying in B60W 60/0051 - B60W 60/0061, processes used to initiate or abort handover are classified in the relevant subgroups of B60W 60/0051 - B60W 60/0061 and processes performed during handover are classified in B60W 60/0051 - B60W 60/0053.
This place covers:
The use of precise infrastructure information provided by the on-board vehicle navigation system or by an external system.
Attention is drawn to the following places, which may be of interest for search:
Traffic control systems |